Quentin Lindsey
Yale University
Berkeley College (BK '07)
Mechanical Engineering & Electrical Engineering
REU (RESEARCH EXPERIENCE FOR UNDERGRADUATE) @
MACHINE INTELLIGENCE LABORATORY
UNIVERSITY OF FLORIDA
Links:
Yale Engineering
ENALAB (Embedded Network and Applications Laboratory
Personal Project:

SUMMER GOAL &
DESCRIPTION
RED BULL'S purpose is to extringuish fires autonomously. It will prowl the campus of Yale University in search of fires started by clumsy freshmen. Using an array of sensors in front including a pyroelectric sensor, which detects heat both body heat and flames and an IR proximity sensor for obstacle avoidance, it will detect and extringuish the fire using a multiaxis water cannon.
ULTIMATE GOAL
The object of this project is to develop a multiagent fire fighting squad. Each agent would have independent abilities that will be used in conjunction with independent autonomous vehicles. The larger of the two will the main fire fighting agent. It will be equipped with obstacle avoidance as well as line following sensors. Its main equipment will be a water cannon capable of delivering a stream of water to multiple floor buildings under the direction of the smaller agent. It will not be equipped to detect or locate the fire. The other smaller agent will be based on a toy tank platform equipped with CMU camera with multiaxis rotation and a pyroelectric sensor. Its main tasks is to locate the fire, inform the larger agent and aim the water cannon.
Pictures:
Parts:
Journal:
Week 1:
Worked on the Group projects
Mouse:
Worked on my personal robot.
Finished the Bill of Materials for the first larger agent.
Week 2:
Spent hours upon hours finishing orders for the BOM.
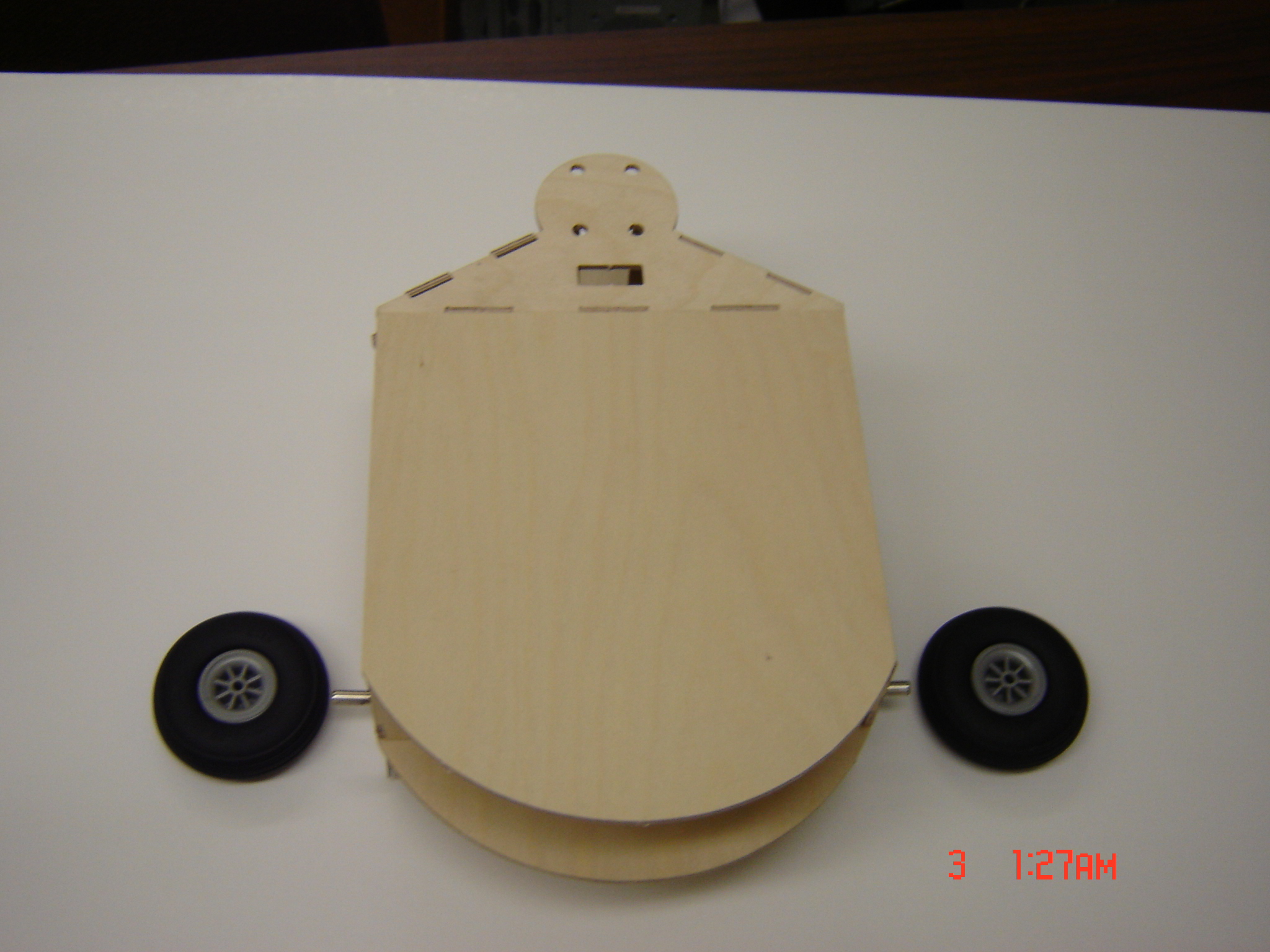
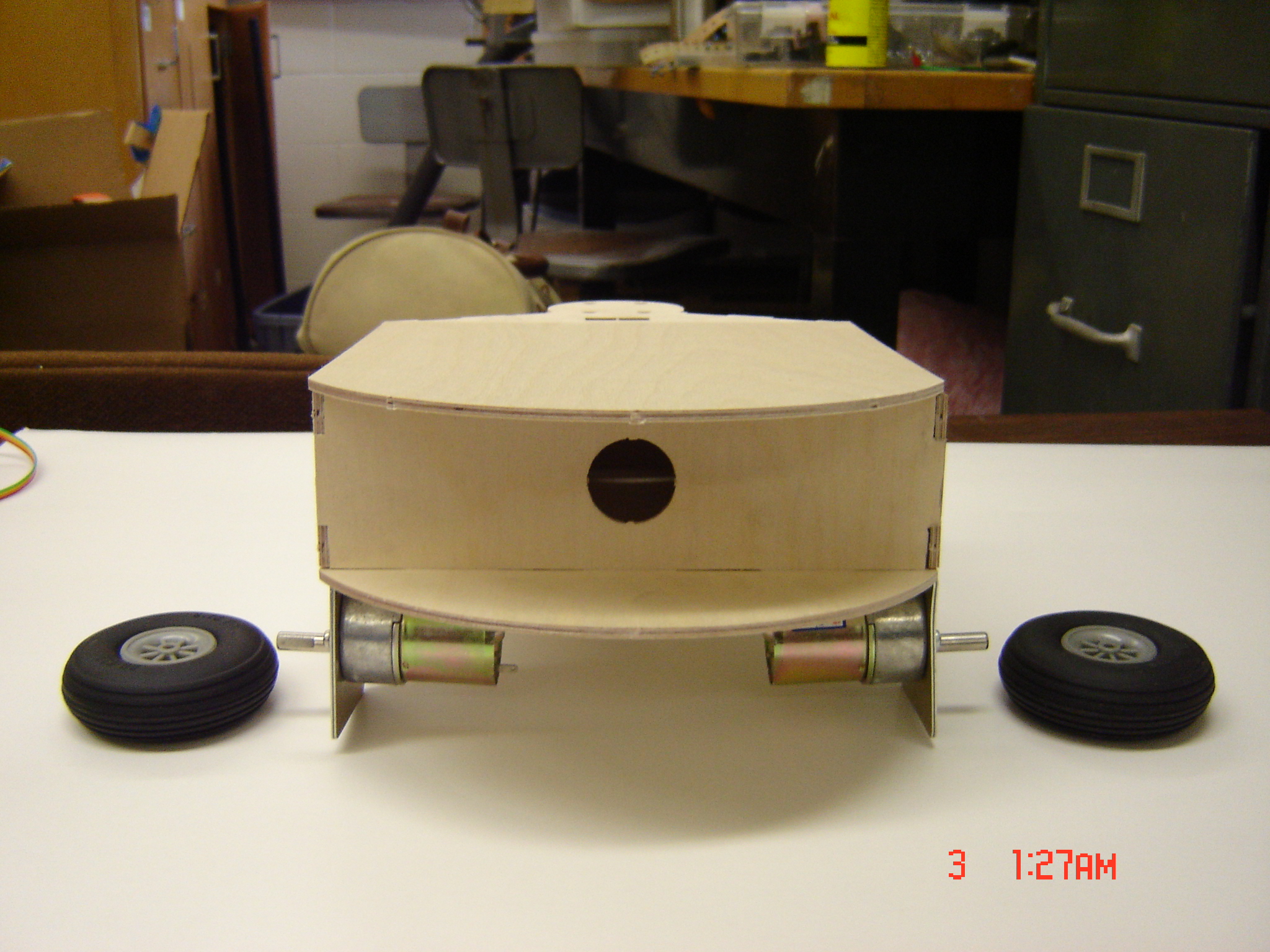
Designed the chassis in autocad and 3d modeled it.
Week 3:
Week 4:
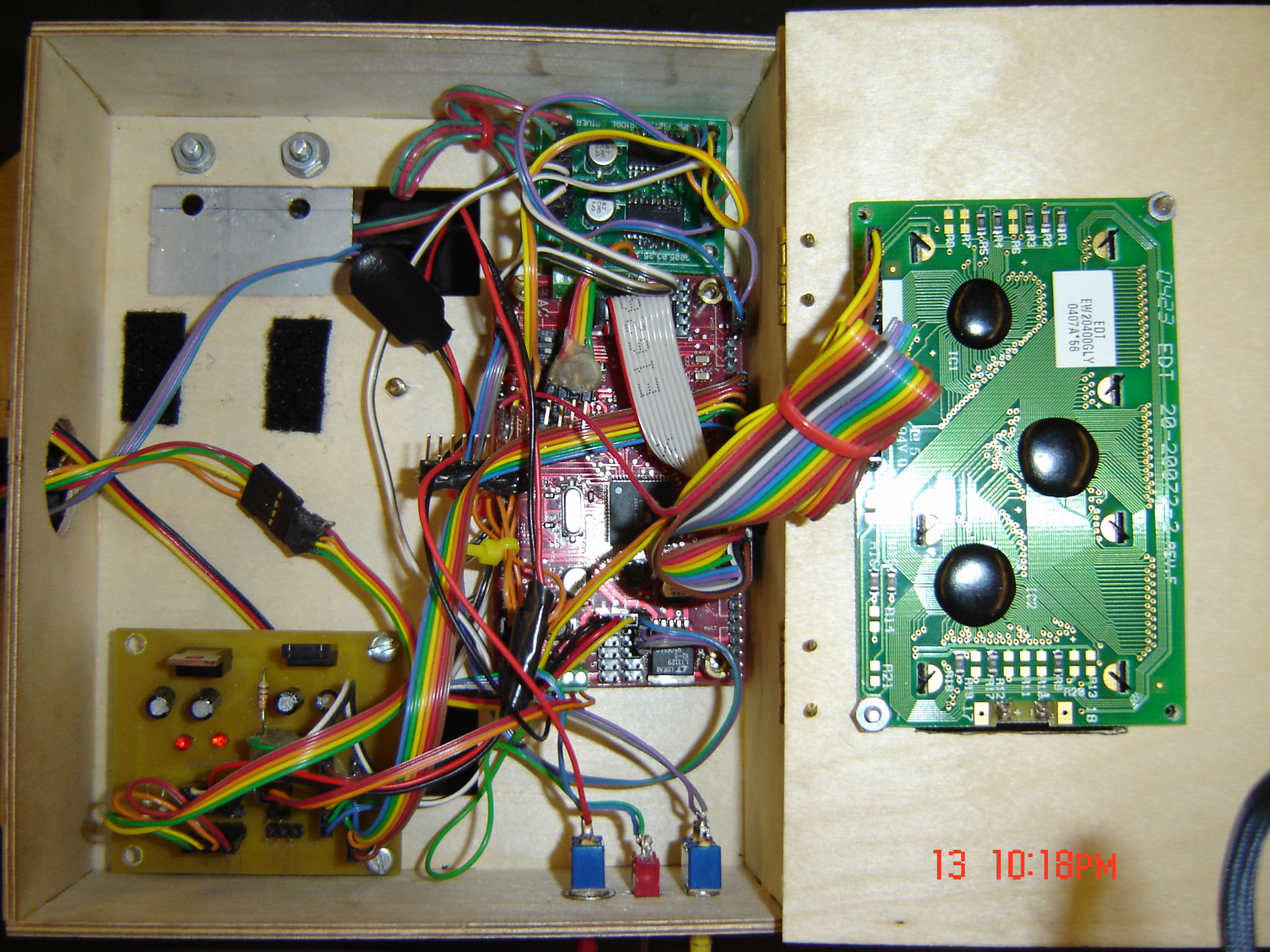
Interfaced LCD display.
sending commands, variables, and text.
TTECHed the platform.
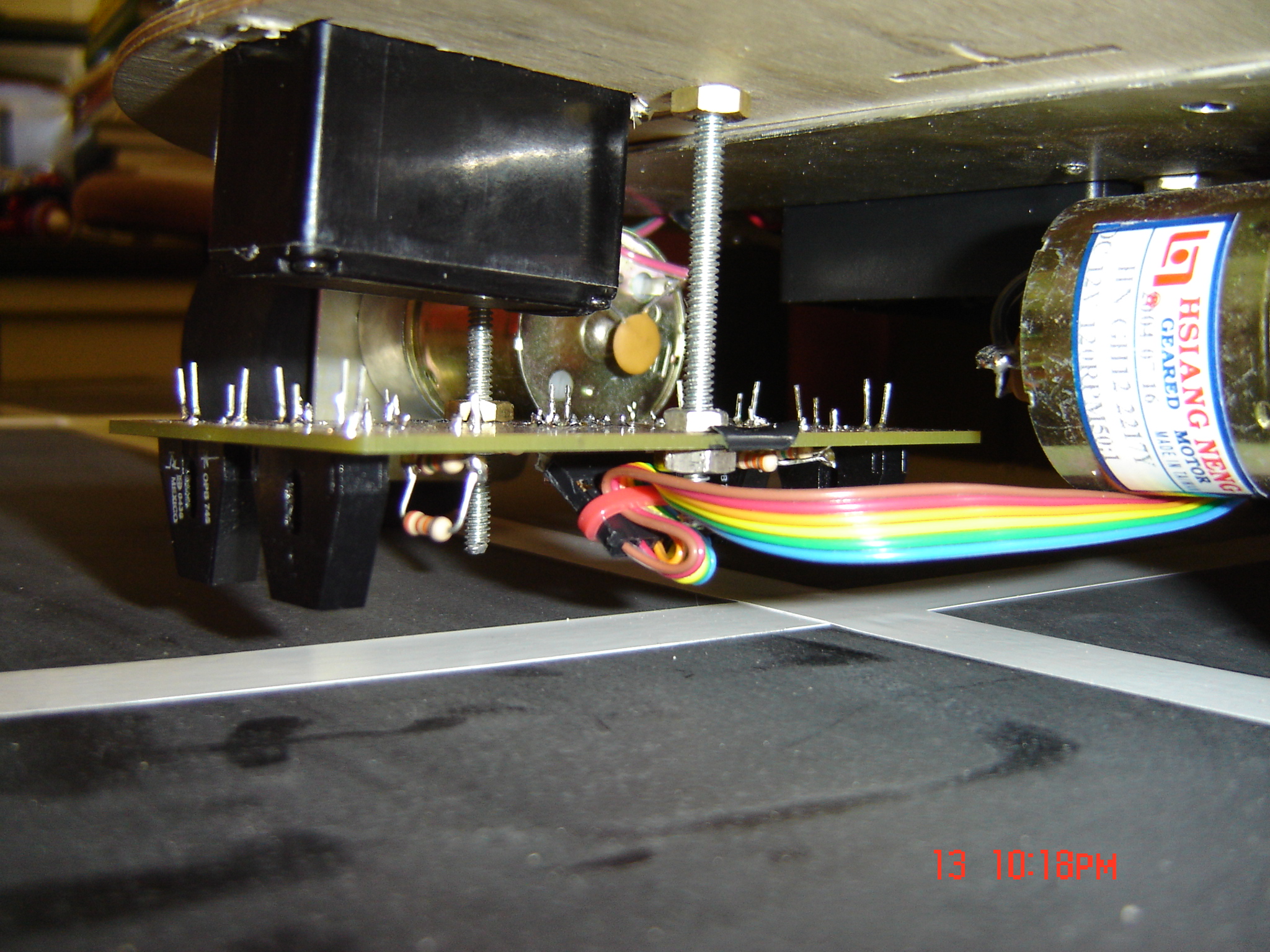
made motor mounts and mounted to the platform
assembled the platform
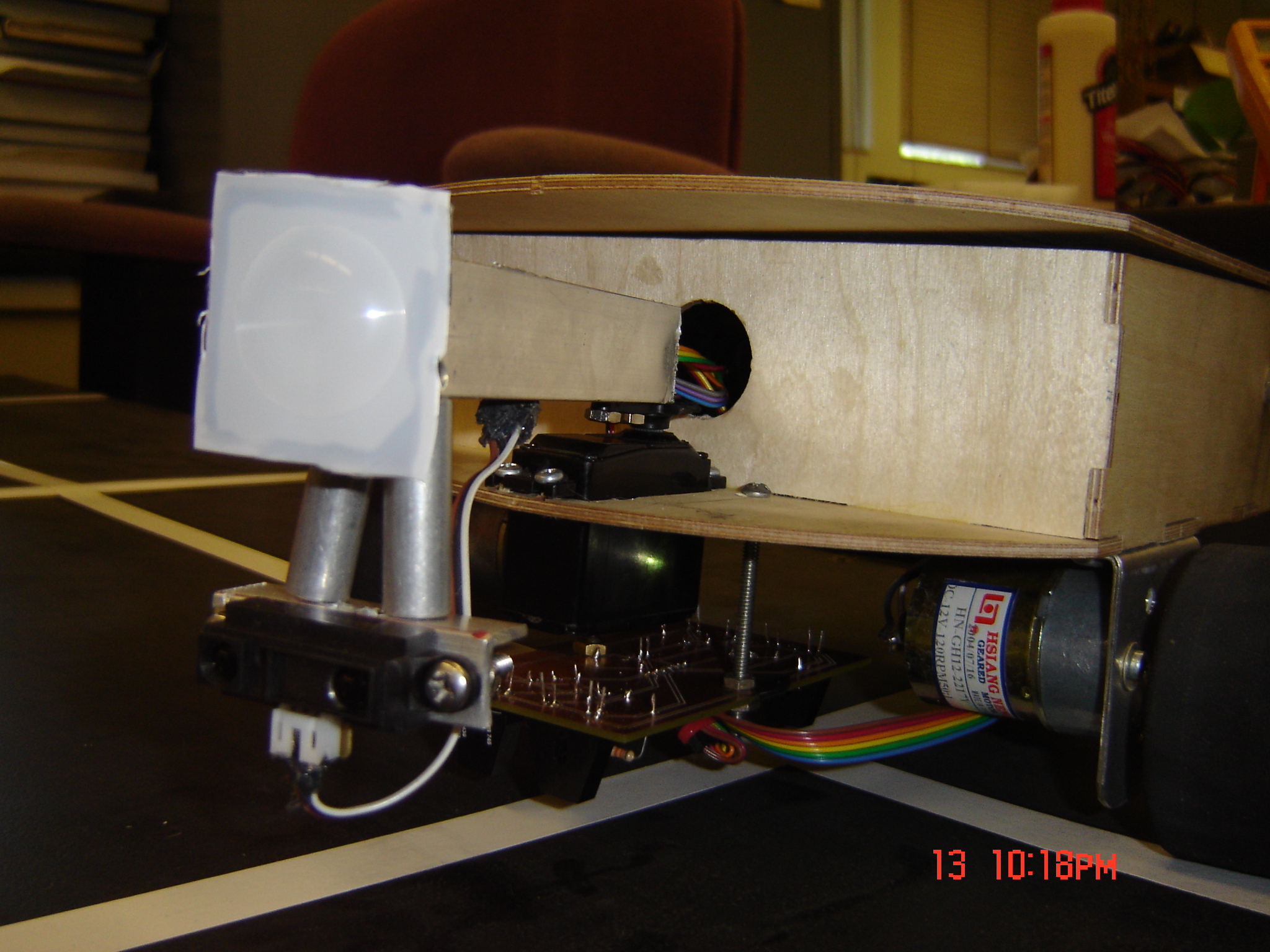
interfaced servos and motors with the help of Sara Keen.
soldered the driver board designed by William Dubel.
completed the junun order.
added a camera platform for the cmu cam.
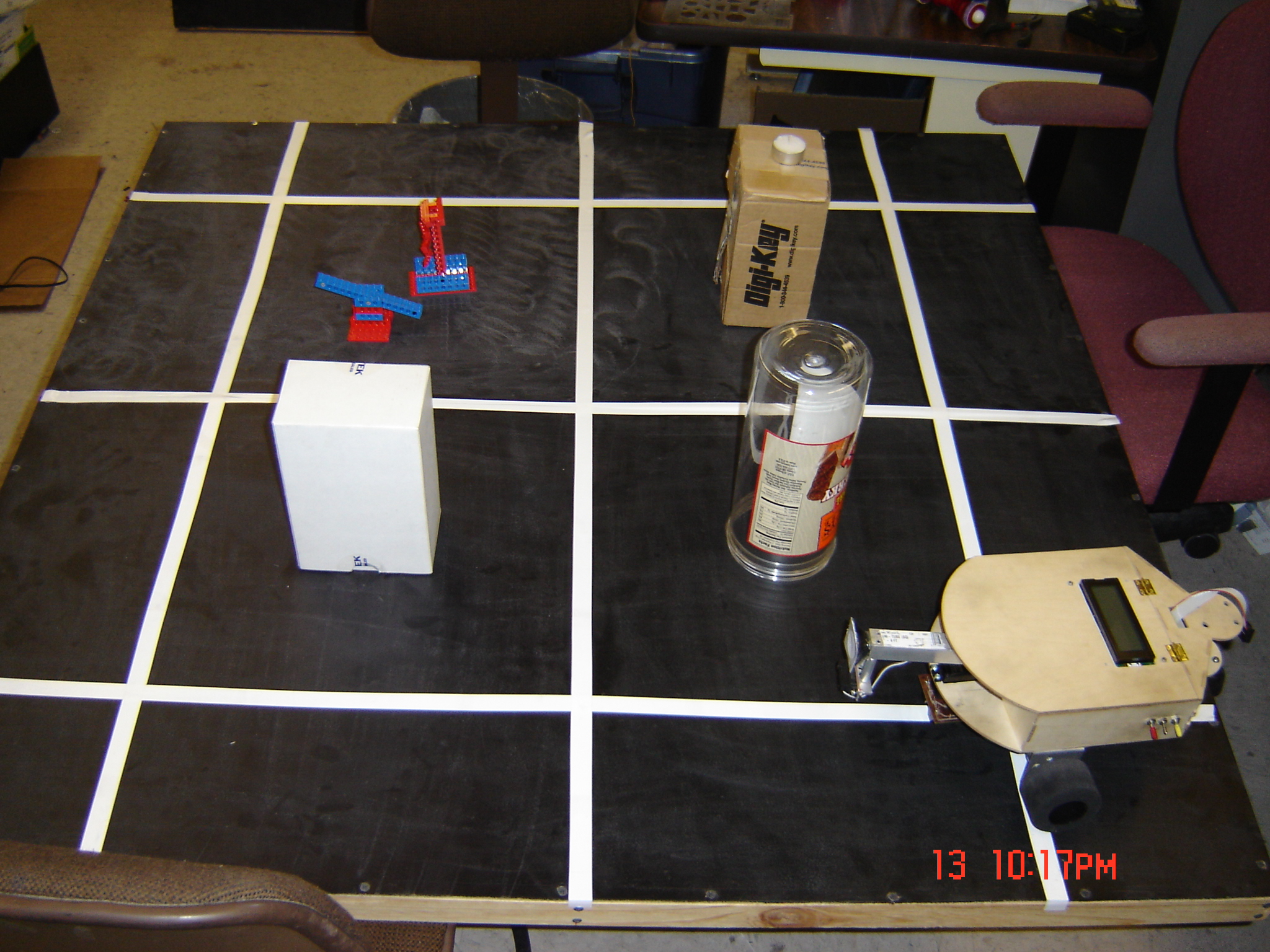
before leaving the lab on friday attached motors and ran a moving test.

Yale Engineering
ENALAB (Embedded Network and Applications Laboratory
Personal Project:
RED BULL
RED BULL'S purpose is to extringuish fires autonomously. It will prowl the campus of Yale University in search of fires started by clumsy freshmen. Using an array of sensors in front including a pyroelectric sensor, which detects heat both body heat and flames and an IR proximity sensor for obstacle avoidance, it will detect and extringuish the fire using a multiaxis water cannon.
ULTIMATE GOAL
The object of this project is to develop a multiagent fire fighting squad. Each agent would have independent abilities that will be used in conjunction with independent autonomous vehicles. The larger of the two will the main fire fighting agent. It will be equipped with obstacle avoidance as well as line following sensors. Its main equipment will be a water cannon capable of delivering a stream of water to multiple floor buildings under the direction of the smaller agent. It will not be equipped to detect or locate the fire. The other smaller agent will be based on a toy tank platform equipped with CMU camera with multiaxis rotation and a pyroelectric sensor. Its main tasks is to locate the fire, inform the larger agent and aim the water cannon.
Pictures:
Parts:
Journal:
Week 1:
Worked on the Group projects
Mouse:
Worked on my personal robot.
I decided to go with the MavrikIIb
because I'm not sure if I want to spend the time building a board that
is almost an exact copy of MavrikIIb. I don't have any special
functions that would be specific that would warrant developing a board.
I also plan to buy another Mavrik for the second agent unless I have
finished building the board.
I have also
almost finished the bill of materials for the first order for the
MavrikIIb.Finished the Bill of Materials for the first larger agent.
Week 2:
Spent hours upon hours finishing orders for the BOM.
Designed the chassis in autocad and 3d modeled it.
Week 3:
Week 4:
Interfaced LCD display.
sending commands, variables, and text.
TTECHed the platform.
made motor mounts and mounted to the platform
assembled the platform
interfaced servos and motors with the help of Sara Keen.
soldered the driver board designed by William Dubel.
completed the junun order.
added a camera platform for the cmu cam.
before leaving the lab on friday attached motors and ran a moving test.