| Robot | Creator | Description | Final Paper |
RIDLAR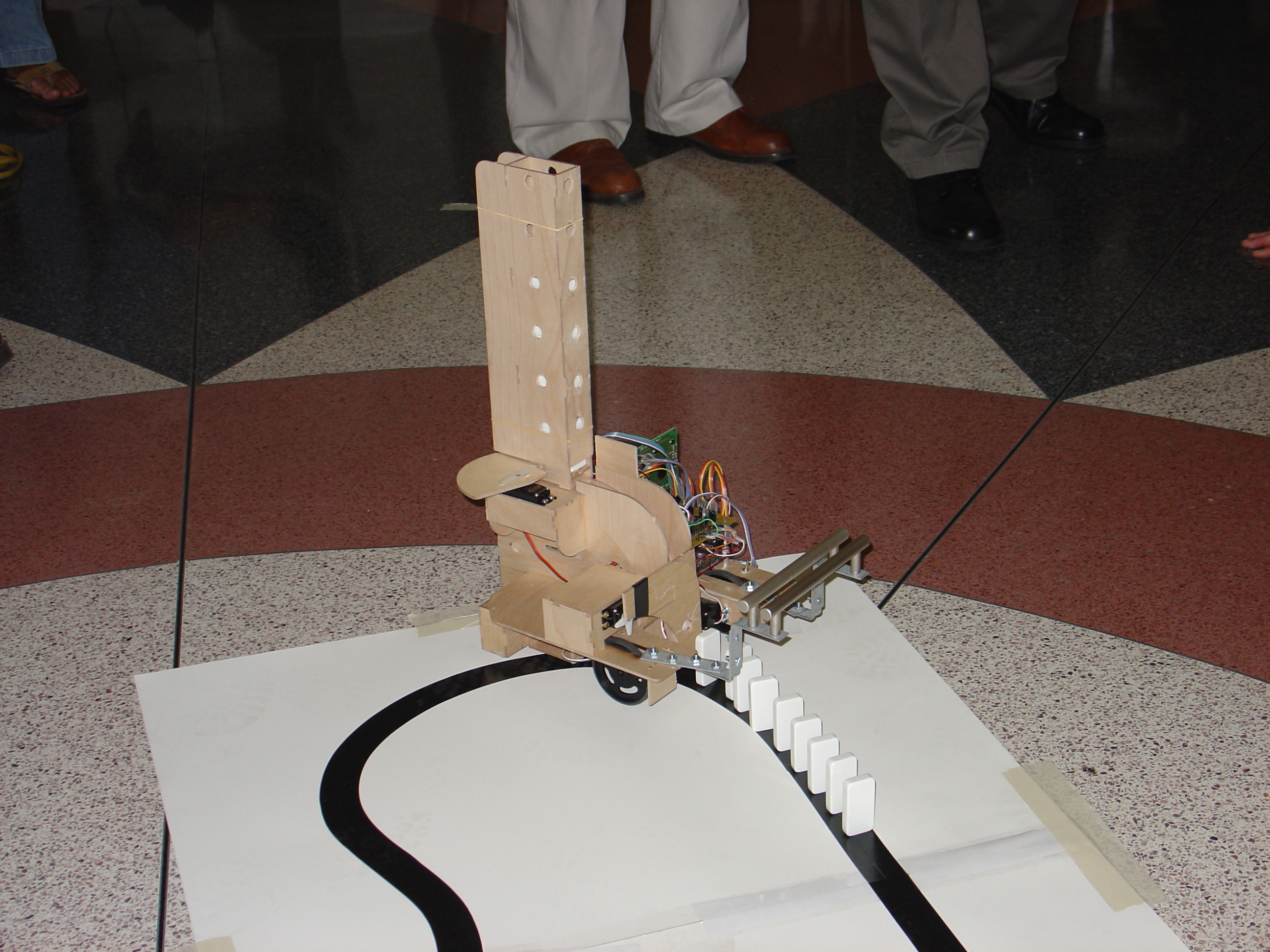
|
Matt Yoder | RIDLAR (Reliable Intelligent Domino Laying Autonomous Robot) will follow a black line on a white surface and lay dominoes along its path. If the black line forms a loop, then RIDLAR will recognize the first domino and then knock it over. The rest of the dominoes should fall over in the chain reaction. Then it will wait for you to reload the dominoes and will then start all over. |
Final Report Special Report |
Kirby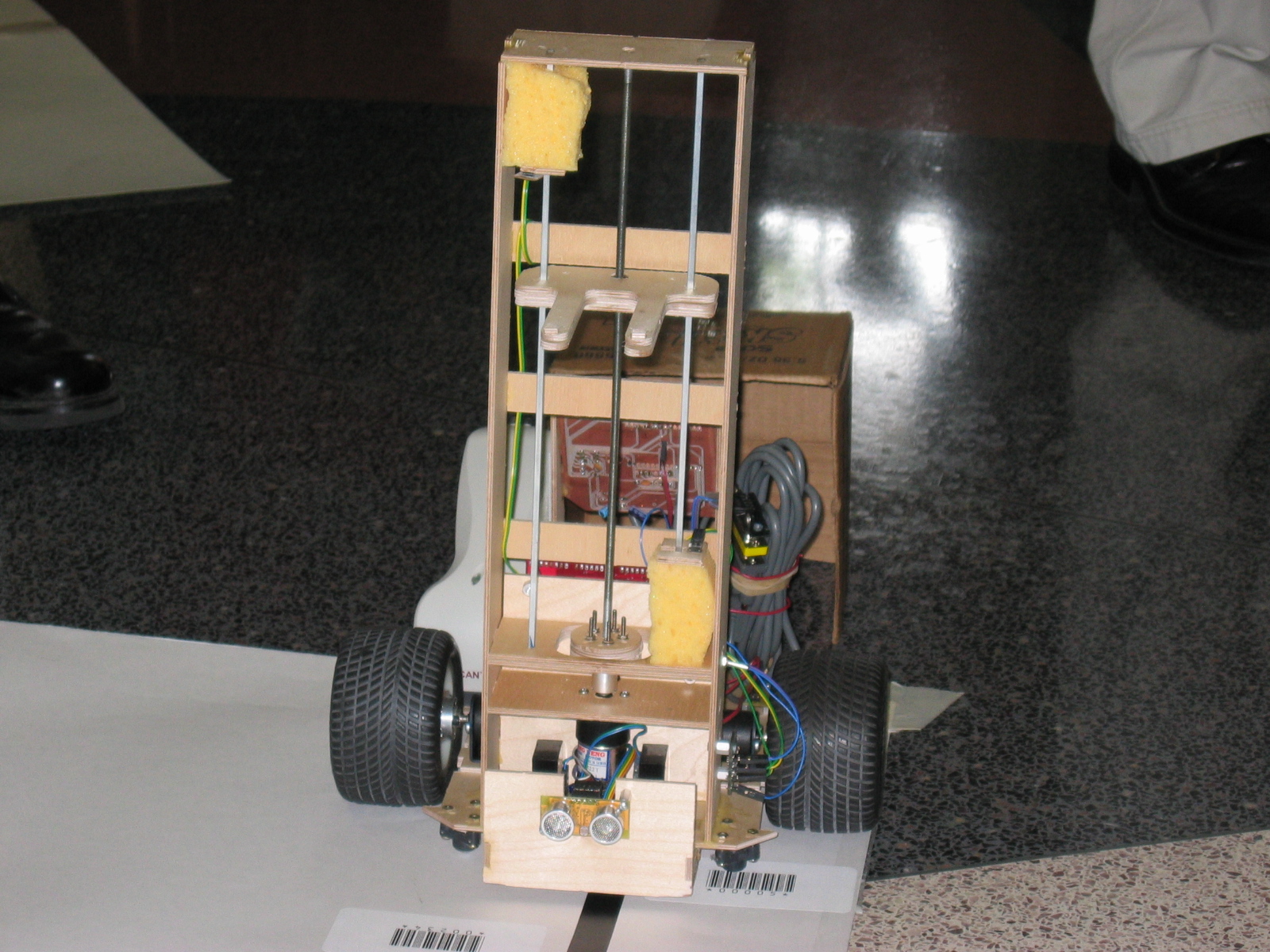
|
Steven Pickles | Acting as a miniature forklift, Kirby will track a line towards one of two warehouses in order to pick up or put away a package. Along the way, Kirby will read barcodes positioned on the ground to decide the correct path to take. |
Final Report Barcode |
Backdraft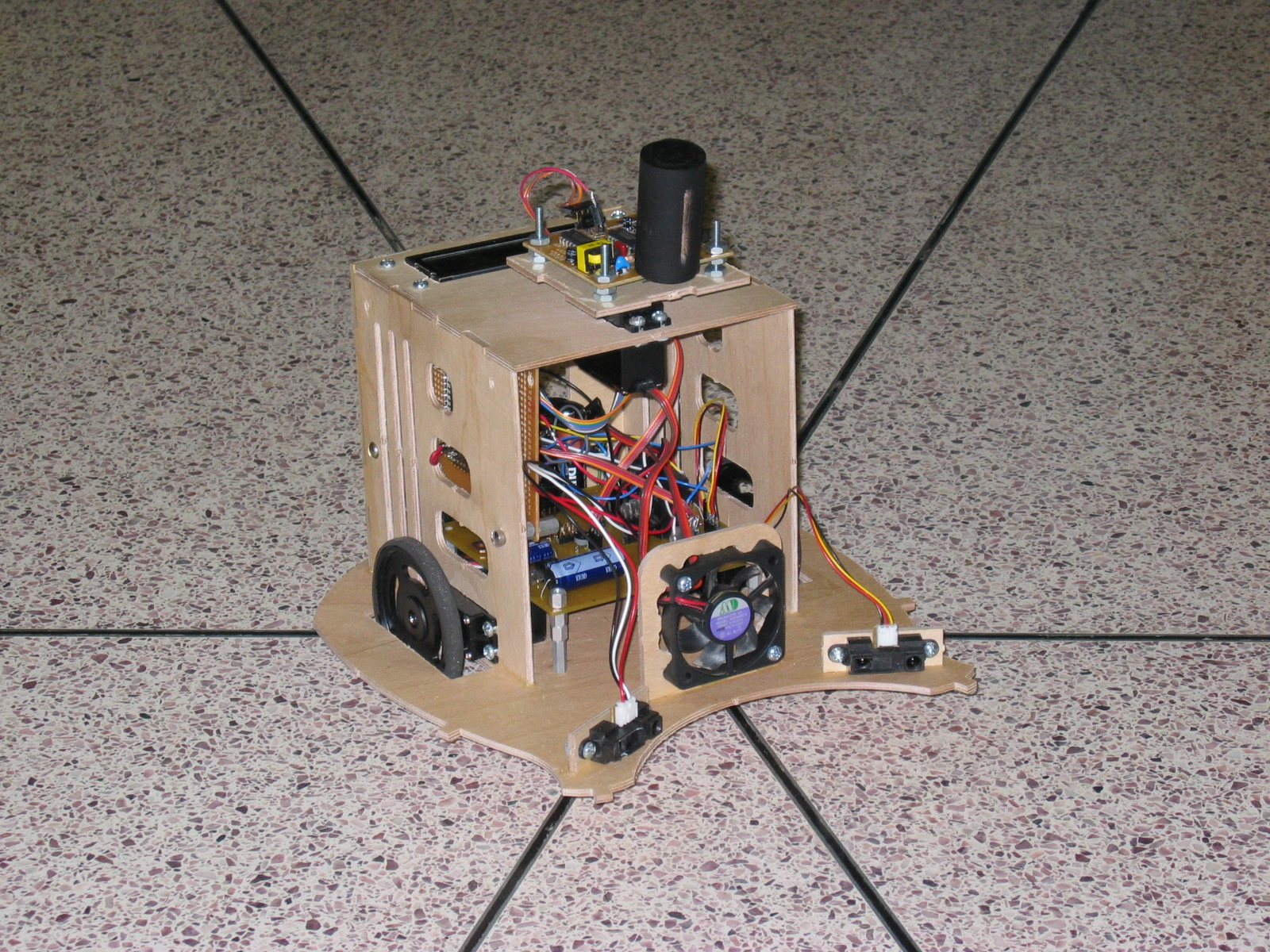
|
Chris Staymates | Backdraft uses a pyro sensor to detect, locate, and extinguish a fire. |
Pyro Sensor |
SEAL
|
Greg Beckham | SEAL (Simple Efficient Autonomous Levitator) will balance an inverted pendulum. |
Final Report Special Sensor |
SBob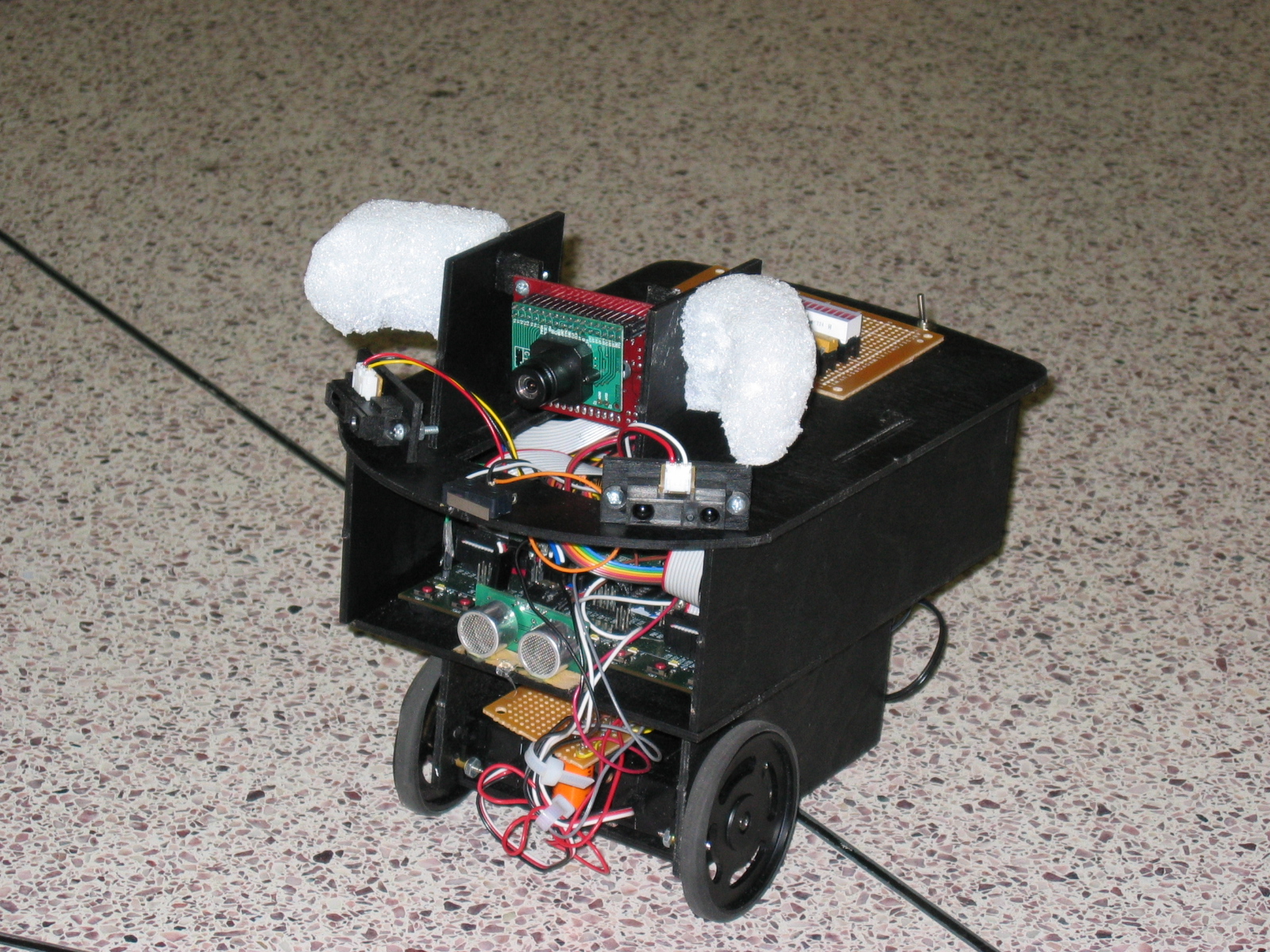
|
Anthony Huereca | Sbob (Seńor Bob) is a bull-like robot that wanders around until encounters a red object. Then tries to ram into it, calculating how close it gets and recording the distance and displaying best distance. Also keeps track of number of misses. |
Final Report CMUCam |
Cyclops
|
Anne Harmeson | Cyclops loves red and will look around a room for a red object, to follow and love forever. Cyclops utilizes a wireless web-camera for data capture, a laptop for image processing, and radio frequency to receive commands from the laptop. |
Final Report Special Sensor |
SPARtan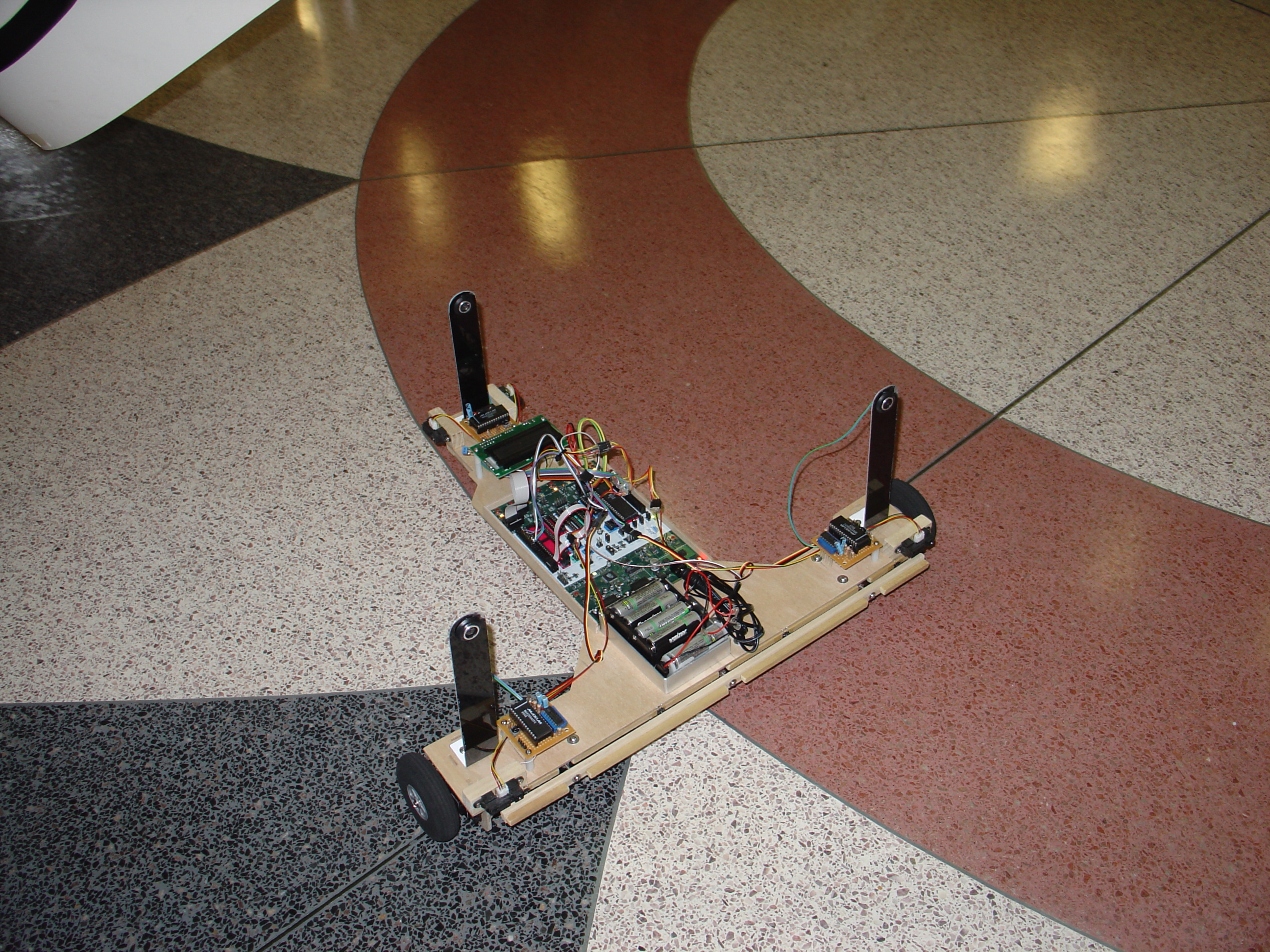
|
Bryan Arkins | SPARtan (Sonar Positioning Autonomous Robot) will use sonar receivers to triangular its position according to a beacon and will make its way to the beacon while obstacle avoiding. |
Final Report Special Sensor |
Equilibrium
|
Chris Taylor | Equilibrium will balance itself on two wheels, in a similar fashion to a Segway. It uses an accelerometer to do so. |
Final Report Special Sensor |
Nolte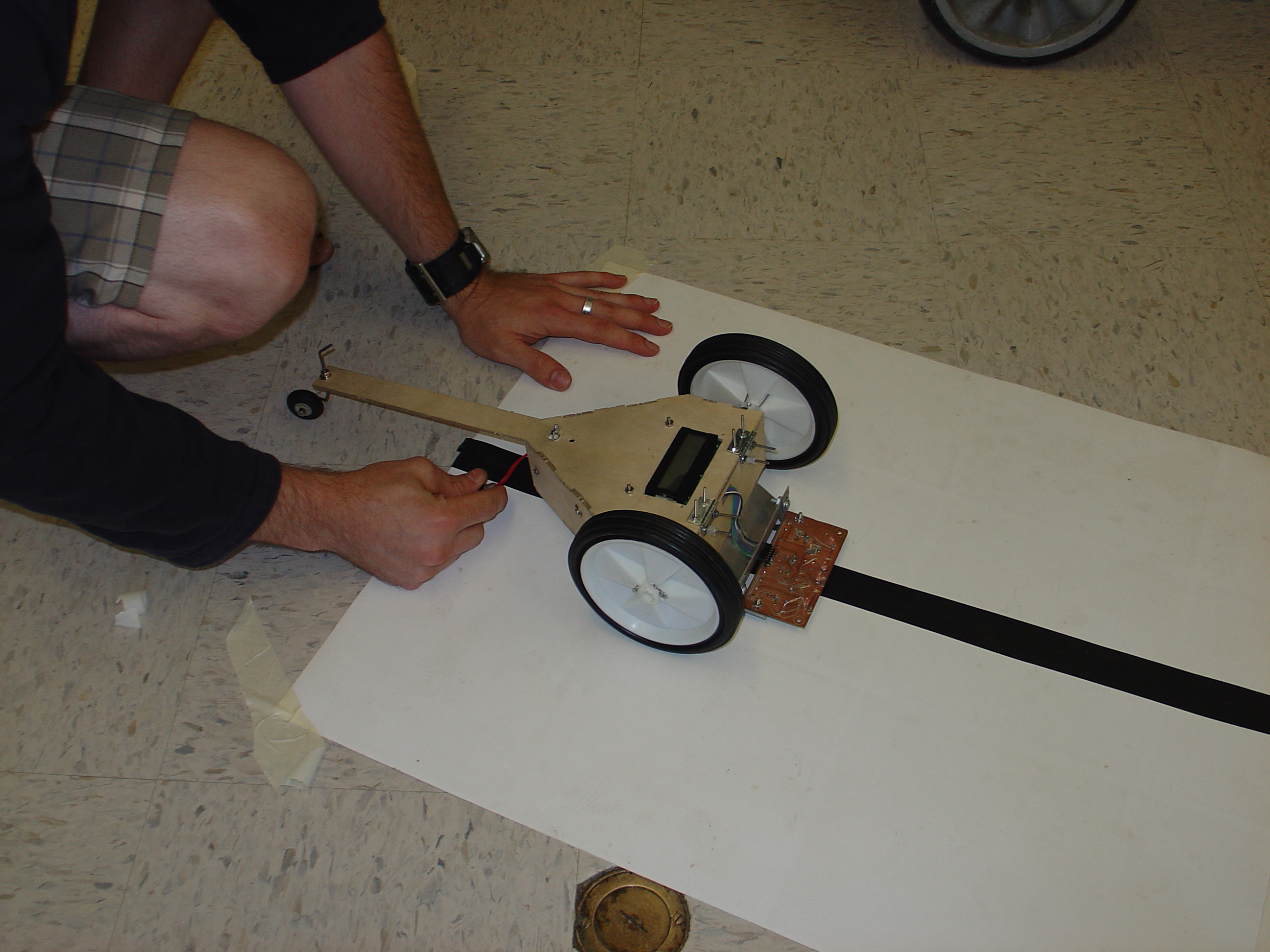
|
Marcum Greeson | Nolte is a high-speed line-following robot. |
Final Report |
RacerX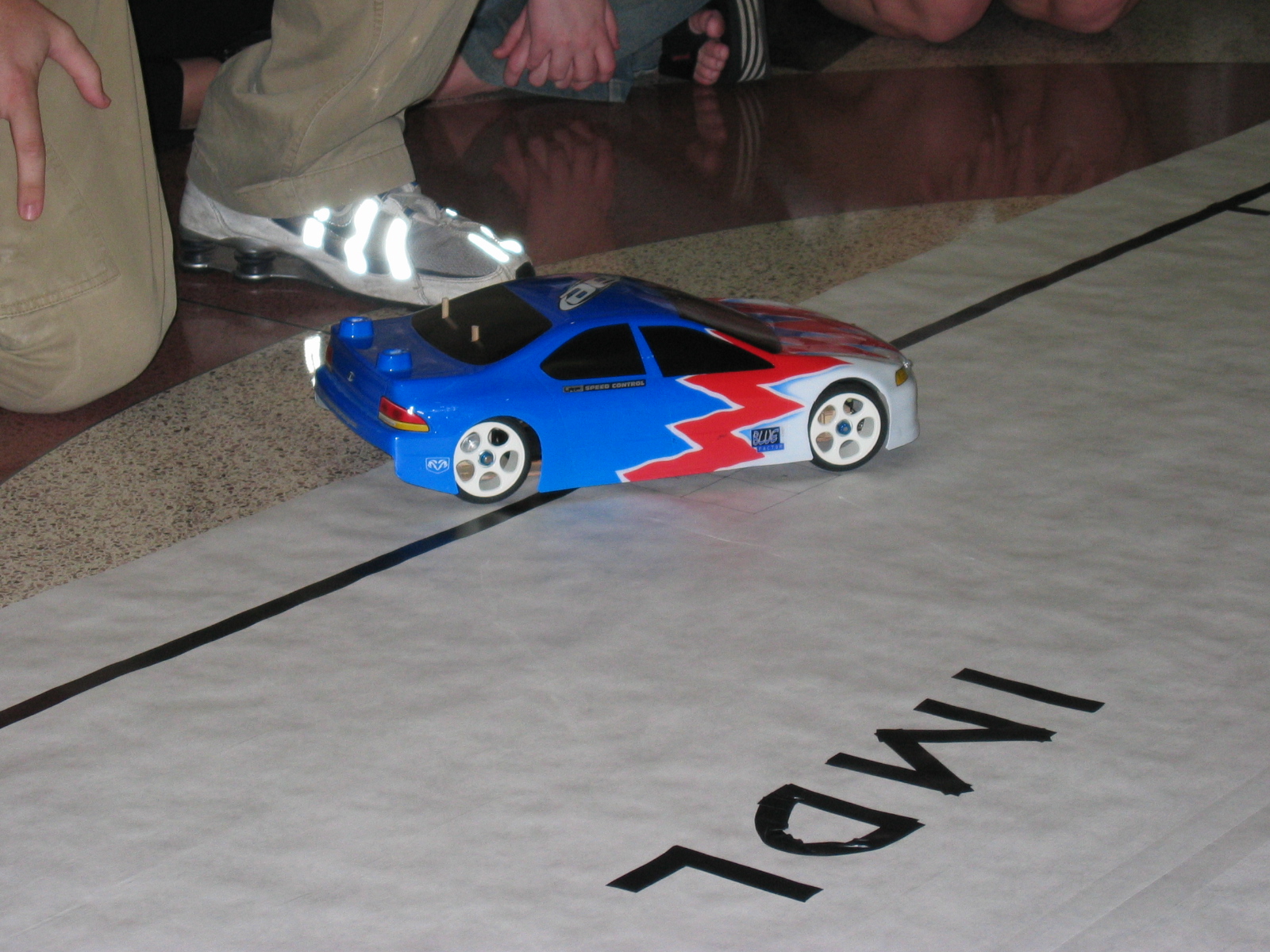
|
Mike Bonostroo | Racer-X is a high-speed line following robot that varies its speed depending whether or not the robot is on a turn or straight away. Racer-X also keeps track of the number of laps it has completed and will automatically stop after a predetermined number of laps. |
Final Report Special Sensor |
Elinem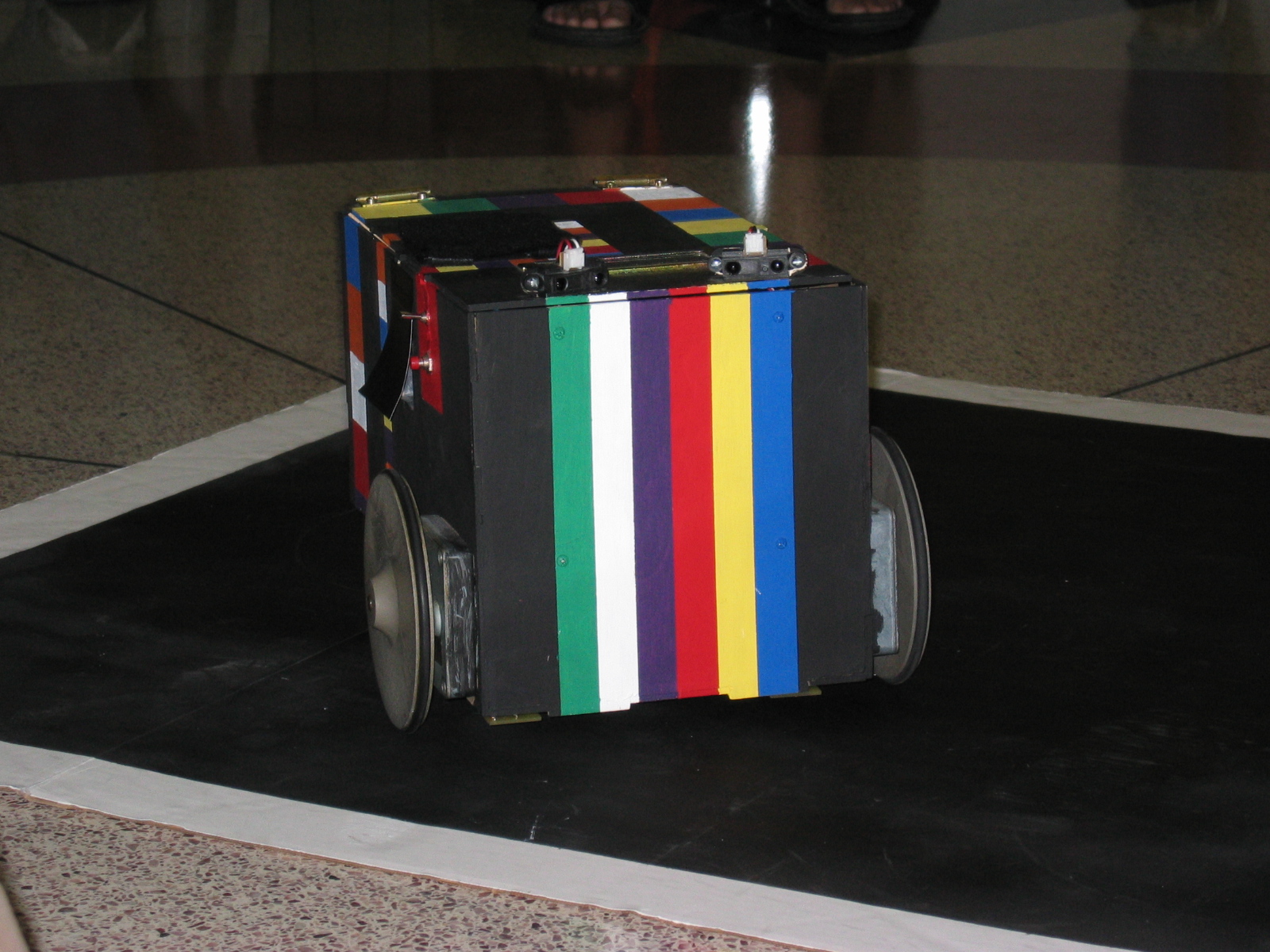
|
Lynnette Miller | ELINEM teaches children colors by requesting blocks by their color and telling the child if they have found the correct color. |
Final Report |
Ginger
|
David Martin | High-speed avoiding robot. |
Final Report Special Sensor |
Gimp
|
Jeff Panos | Gimp will retrieve a stick and bring it back to you while staying on it’s playmat. |
Final Report Special Sensor |