| Robot | Creator | Description | Final Paper |
Dice

|
Clifford Pannella | Dice will play a simplified version of craps. He will roll the dice, find them, read the values, and figure out if he won or lost. |
Final Report
Special Sensor |
Hamelin

|
Matt King | Hamelin will discern between 4 different musical pitches and then based on the pitch he will move forward, back, turn left, or turn right. |
Final Report
Special Sensor |
Betsy 2000

|
Kyle Hagin | Betsy 2000 is an autonomous hovercraft that will avoid objects while going to a preprogrammed GPS location. |
Final Report
Special Sensor |
Initial-B
|
Ian Gerstel | Initial-B is a car-like robot that follows a high-contrast line and avoids obstacles in its path. |
Final Report
Special Sensor |
micro-CHIP
|
Rob Hamersma | micro-CHIP (Micro-Controlled High-tech Independent Putter) will play miniature golf by locating and approaching a golf ball, locating the hole target and putting the ball into the hole. |
Final Report
Special Sensor |
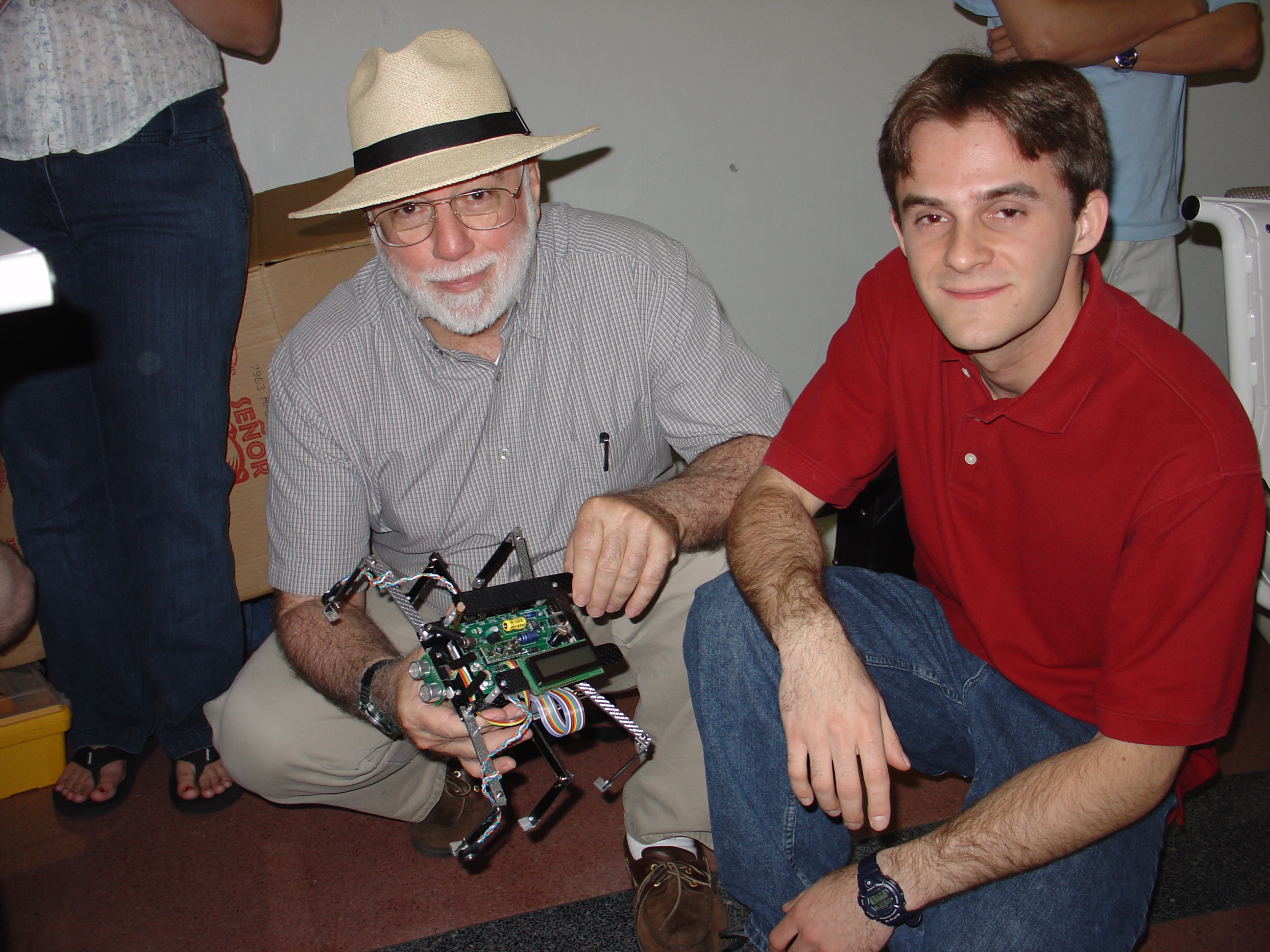
ELSI
|
R. Michael Ihns | ELSI (Electronic Light-Seeking Insect) will behave like a six-legged insect. She will survive on her own by searching for sunlight and using a solar panel to recharge her battery. She will follow light, avoid obstacles, navigate using short-term memory, avoid falling off edges, sense people and react to them, and provide audio and visual feedback to her owner. |
Final Report
Special Sensor |
BallMan

|
Vivek Manoharan | BallMan will sit idly on a tennis court until a stray tennis ball is detected. It will go and retrieve it, and continue this behavior until 3 tennis balls are collected. Once that is finished, it will detect a base station and go and drop off the tennis balls there. |
Final Report
Special Sensor |
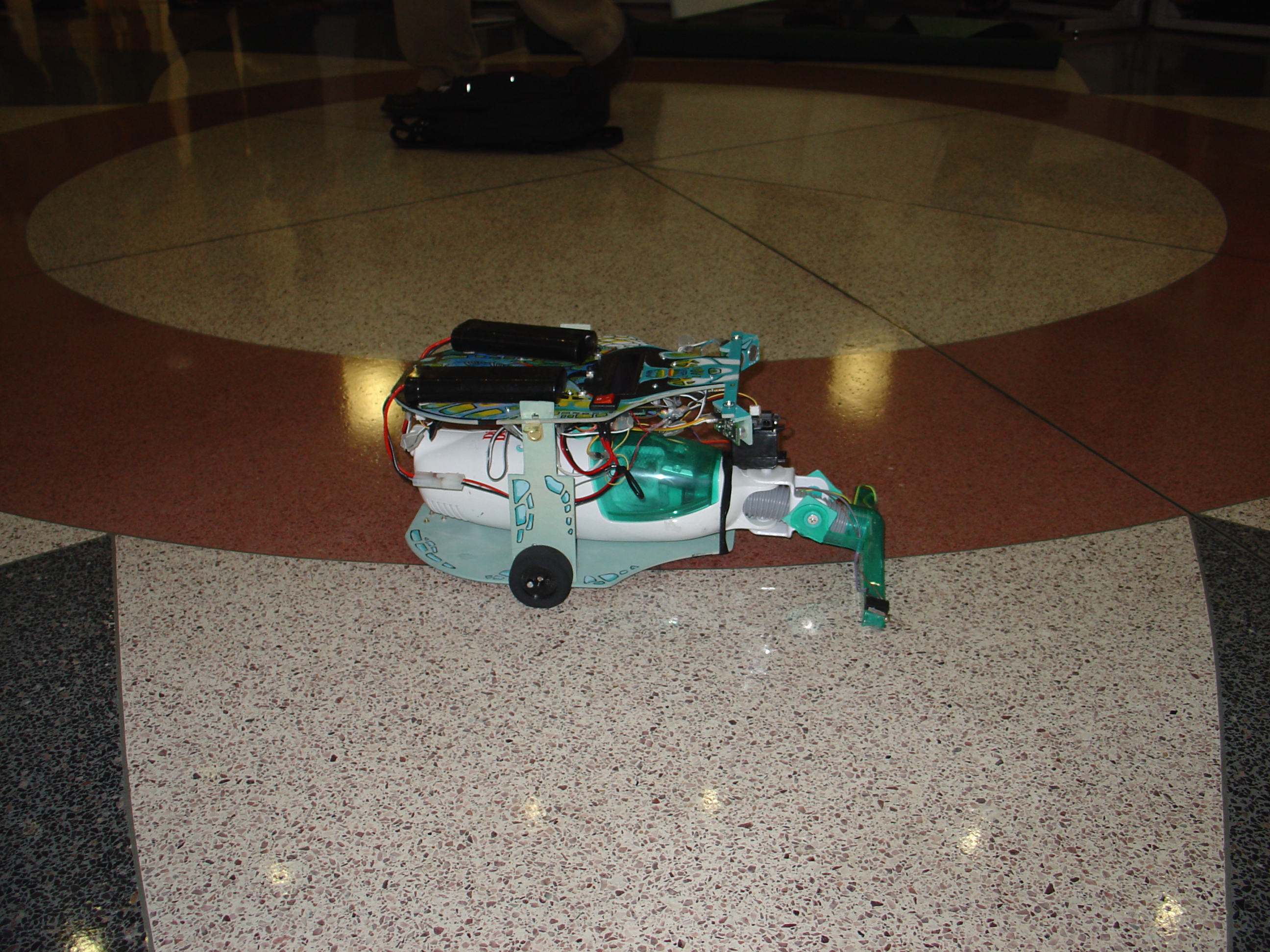
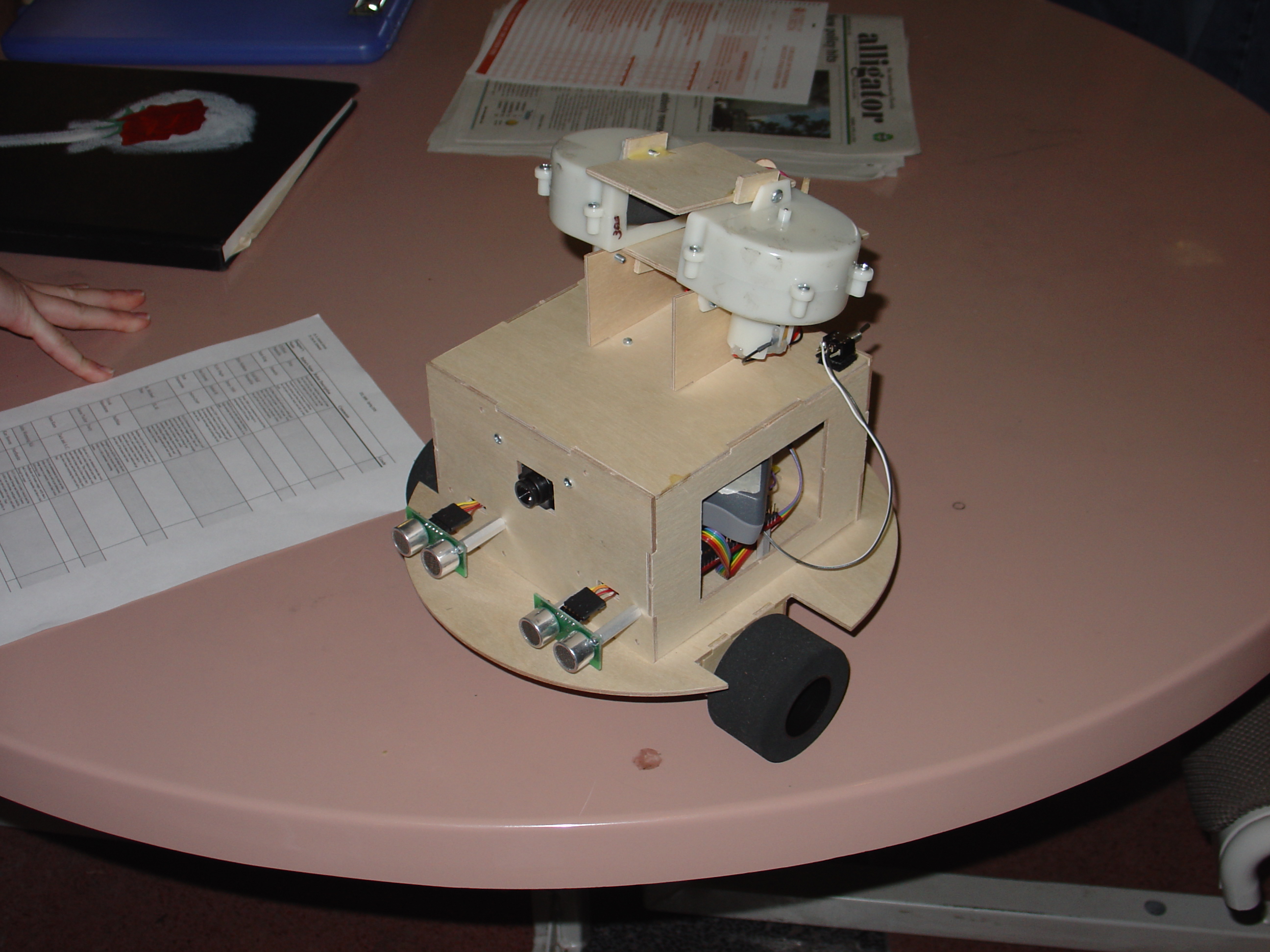
Dusty
|
Aaron Tucker | Designed as an aid for individuals who are unable or unwilling to vacuum their homes, Dusty is a fully automatic vacuuming system. |
Final Report
Special Sensor |
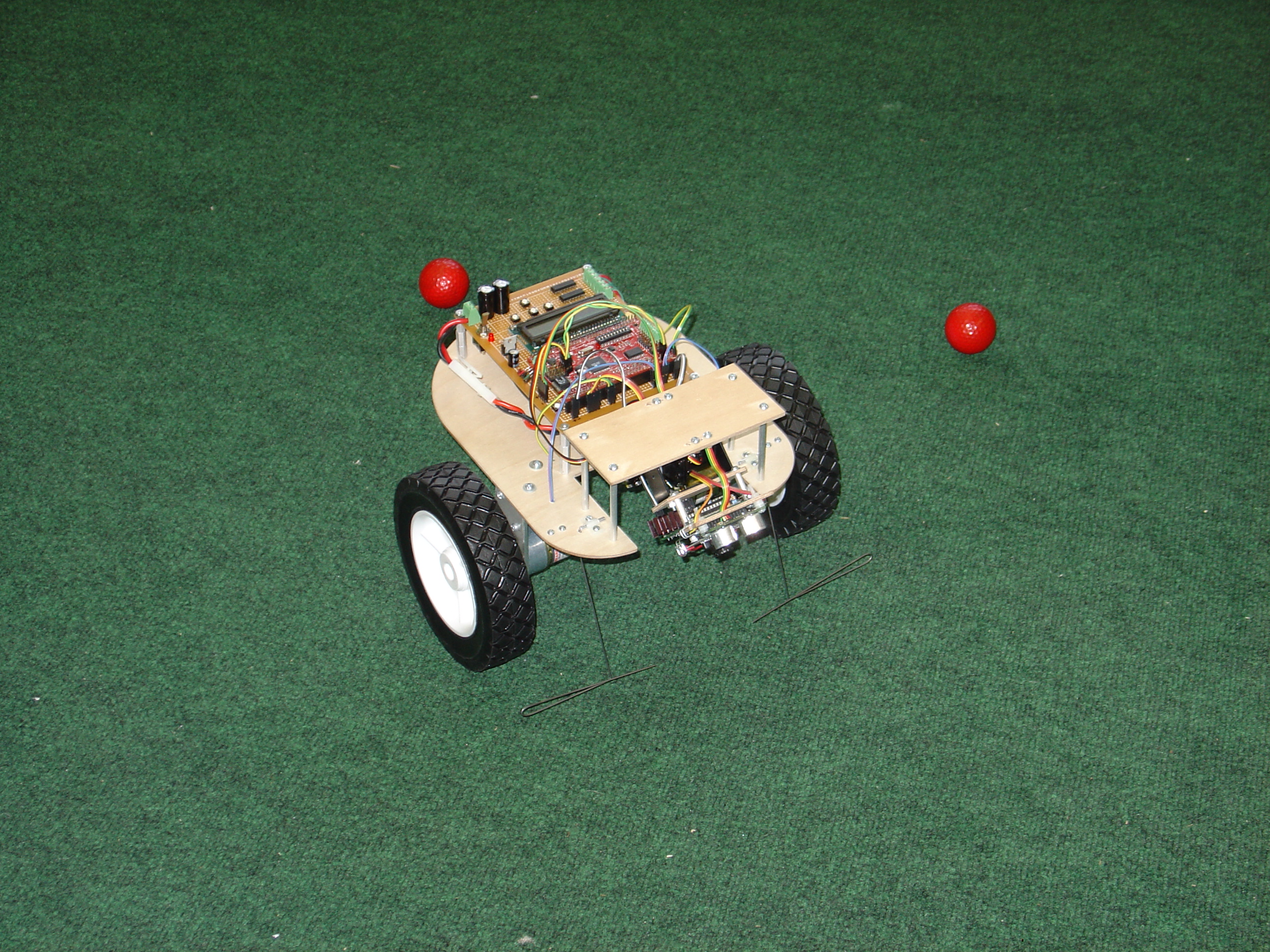
Zack and A.C.

|
Sara Keen | Zack and A.C. are identical robots that work together to collect objects and carry them back to their home. They communicate with each other to keep track of how much they have picked up, and both keep working until they have found everything they were told to find. |
Final Report
Special Sensor |
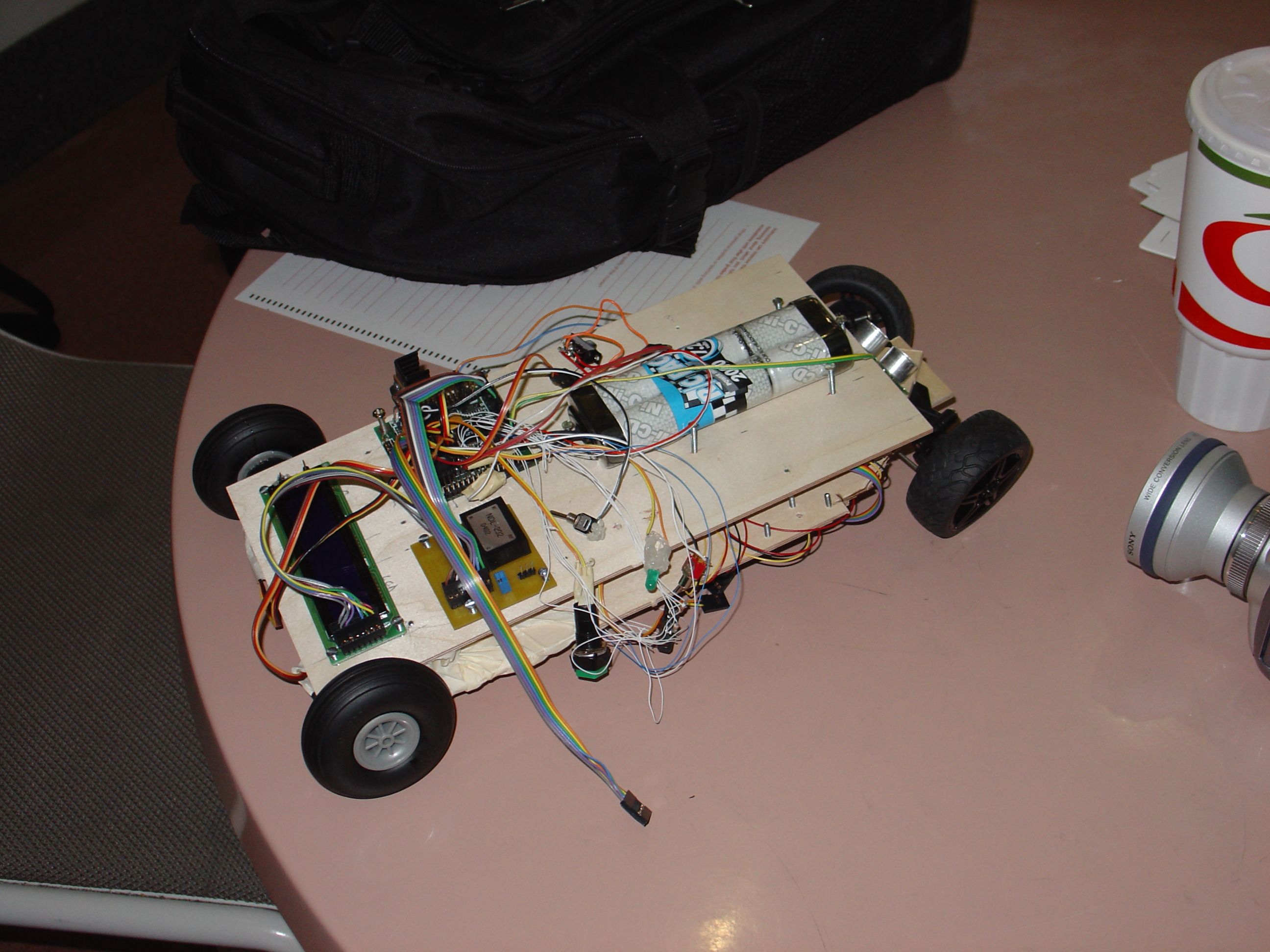
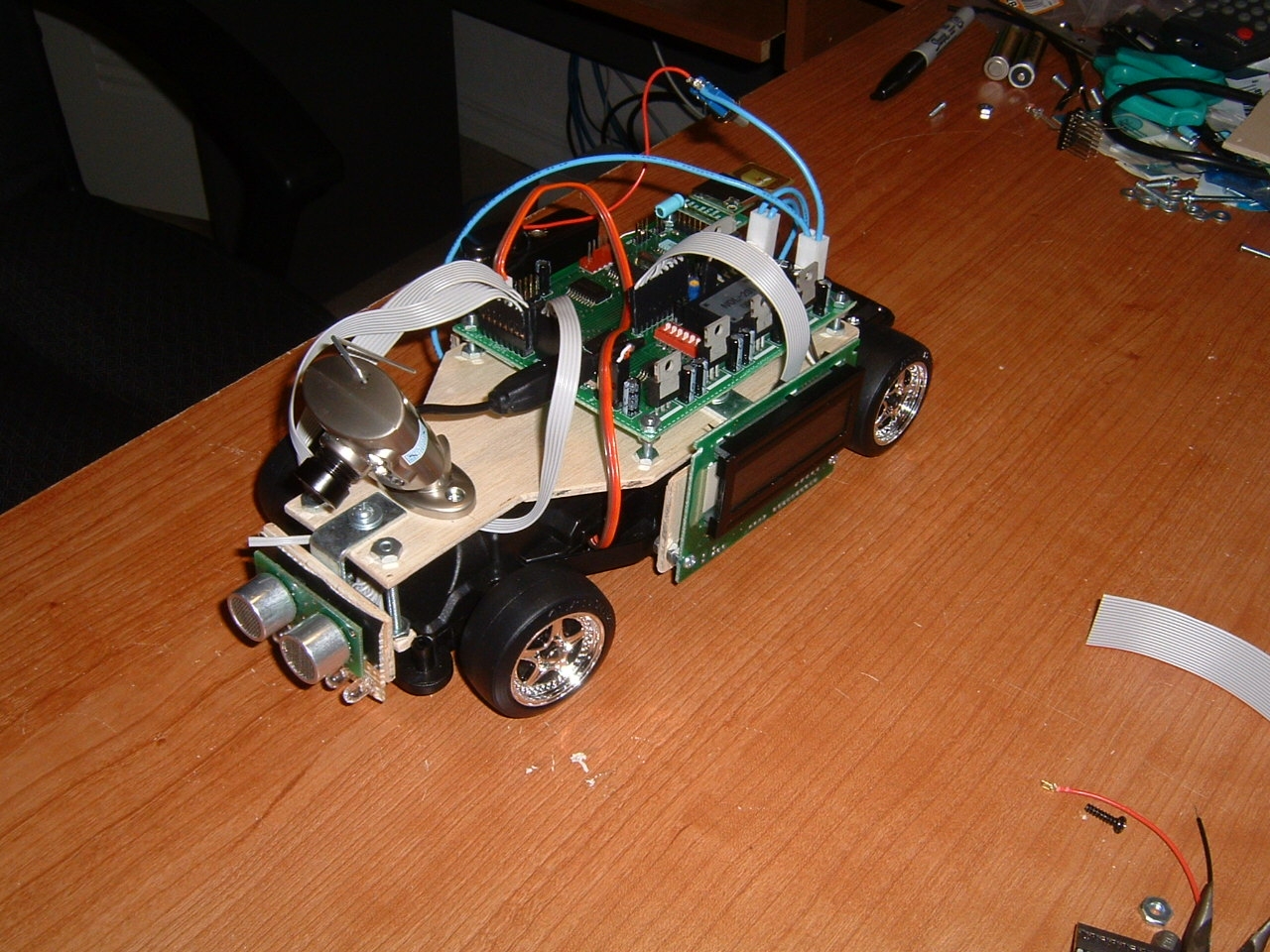
Kit
|
John Wernsing | Kit is an autonomous toy-sized car who relies on a camera as well as an ultrasound range sensor to correctly control itself while following a road. |
Final Report
Special Sensor |
Nerfherder
|
Kari Bowen | Nerfherder will locate a target, verify that a ball is loaded in its launcher, and shoot a ball through the target. |
Final Report
Special Sensor |
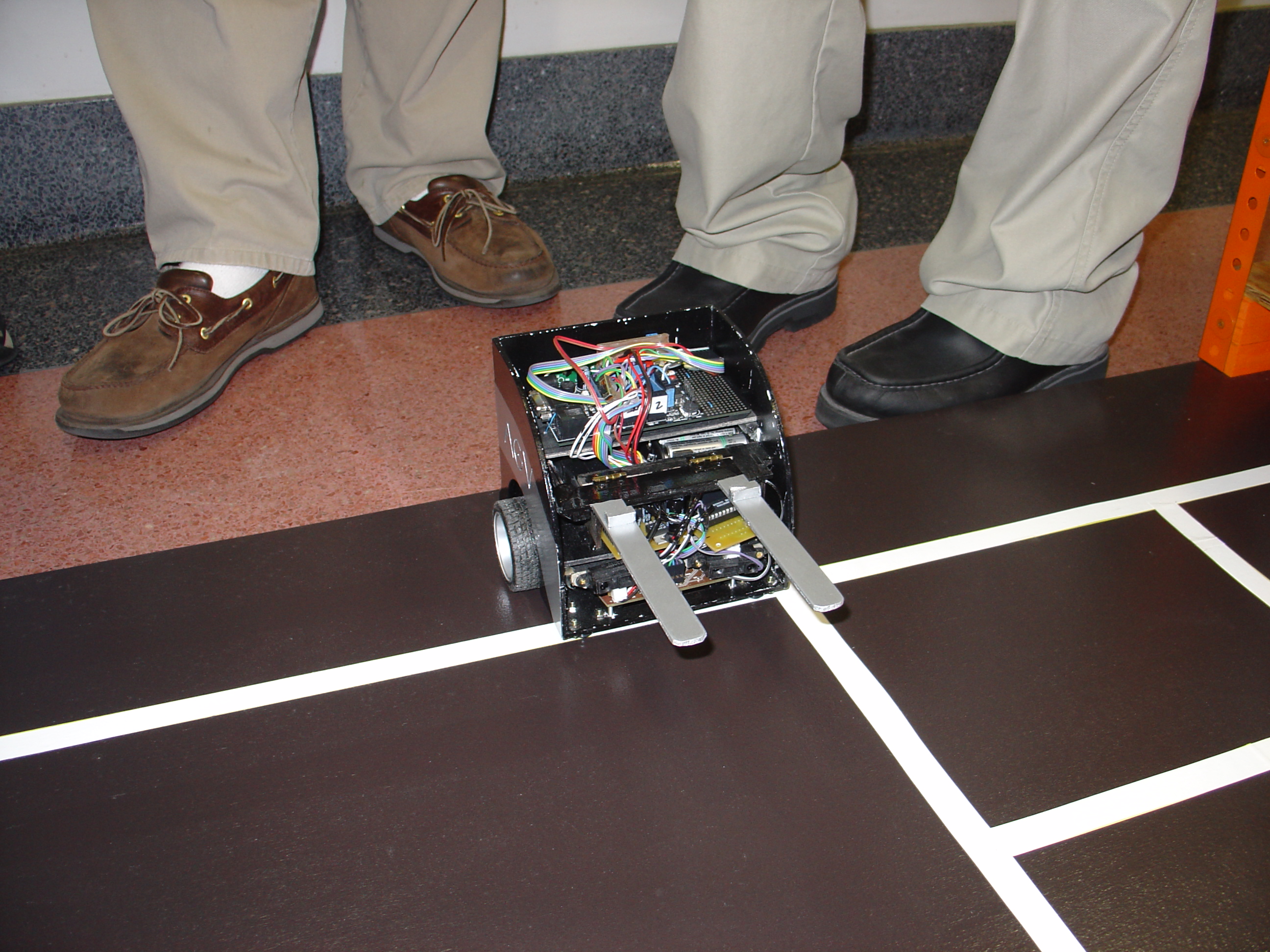
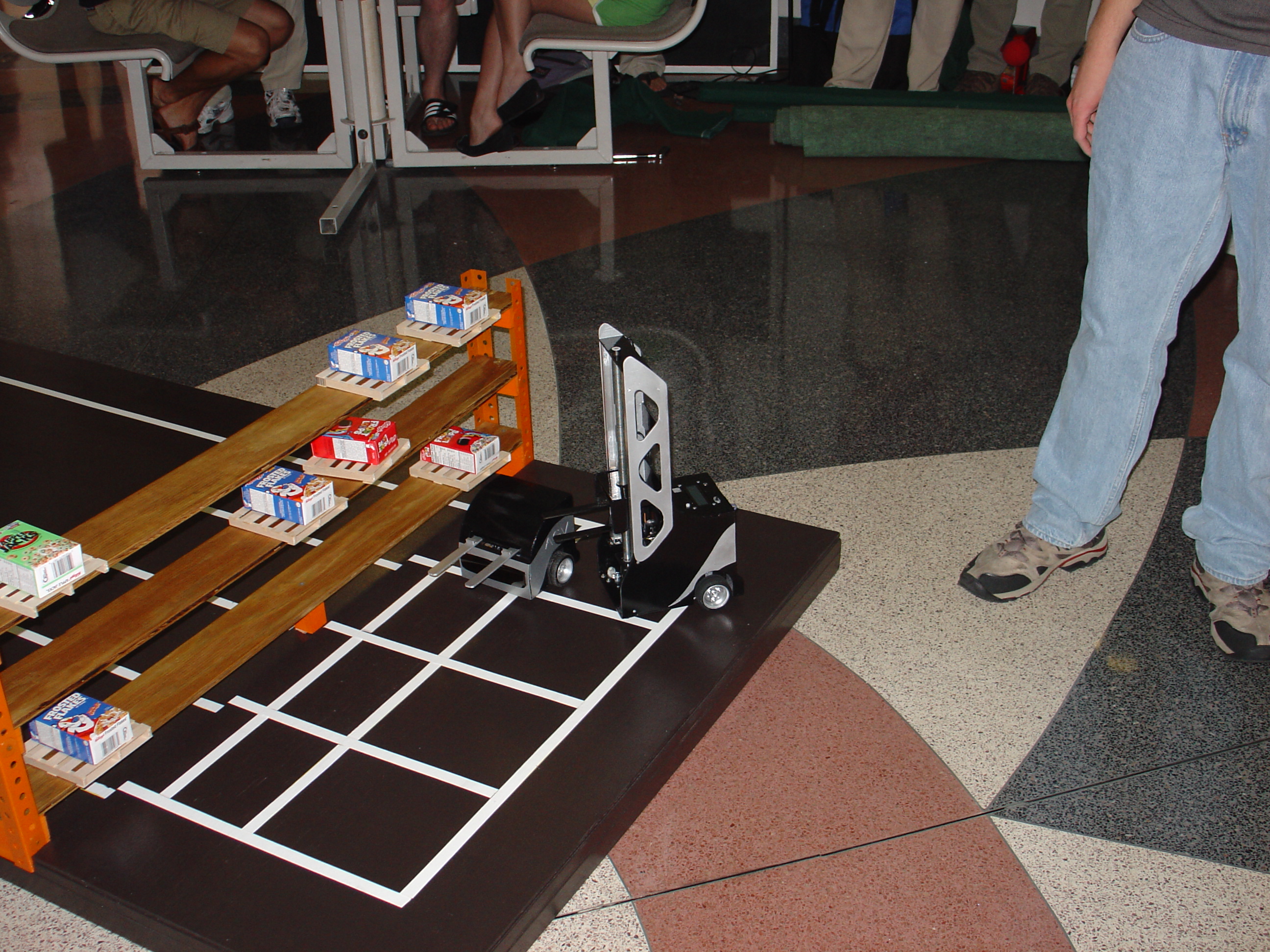
AGV / ASRS
|
Trevor Skipp / Albert Chung | AGV (Automated Guided Vehicle) and the Automated Storage and Retrieval System (ASRS) are driverless, intelligent forklifts. They use optical paths to quickly and safely traverse a model warehouse. Their capabilities are enhanced by the ability to send and receive tasks through radio frequency (RF) and infrared data communication. |
AGV - Final Report
AGV - Special Sensor ASRS - Final Report ASRS - Special Sensor |
Dr. J

|
Jose Garcia | Dr. J. will shoot a basketball into a basketball hoop. |
Final Report
Special Sensor |
Miracle

|
Justin Seabrook | A simple robot that demonstrates obstacle avoidance. |
Final Report
Special Sensor |