| Robot | Creator | Description | Final Paper |
Ant
|
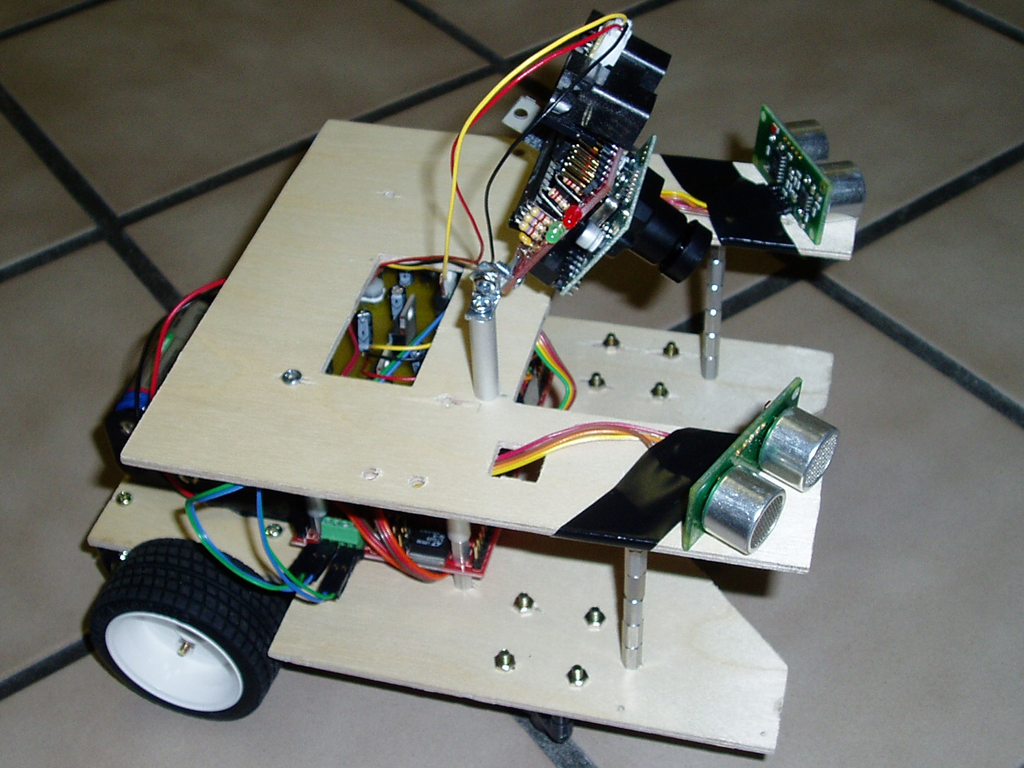
Andrew May | Just like ants, my robot will avoid obstacles, stay on tables, and follow lines. Why? If I break my legs, I can command Ant to get my keys for me. What if I can't reach the salt shaker at a table that is twelve feet long or more? Send out Ant. | Final Report Sp Sensor |
HIWAA
|
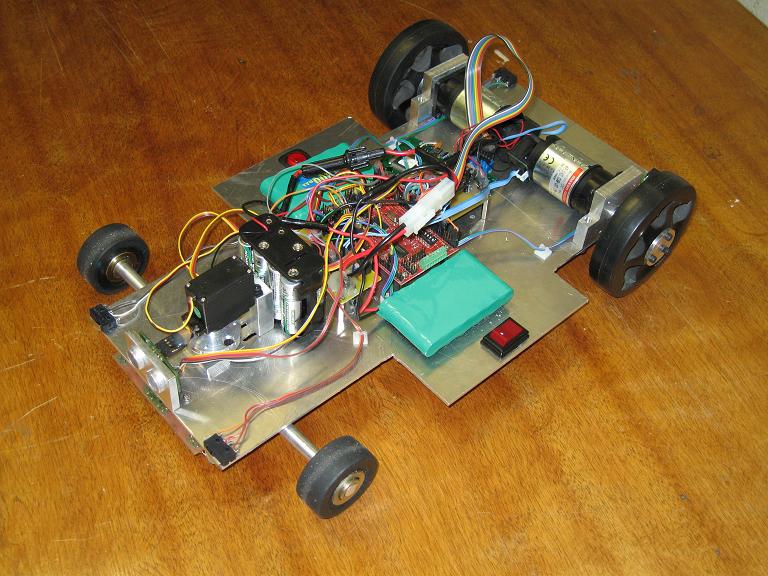
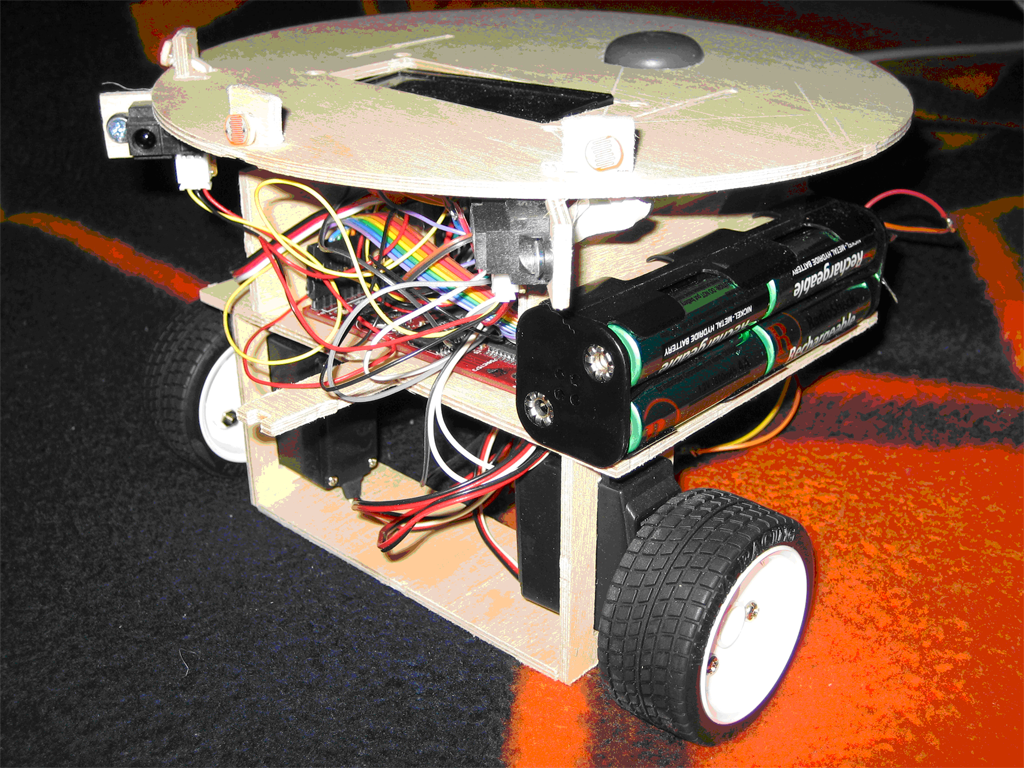
Jon Azevedo | HIWAA (Highly Intelligent Wreck-Free Autonomous Agent) is a line following robot with adaptive cruise control abilities. |
Final Report
|
Ferrarobot
|
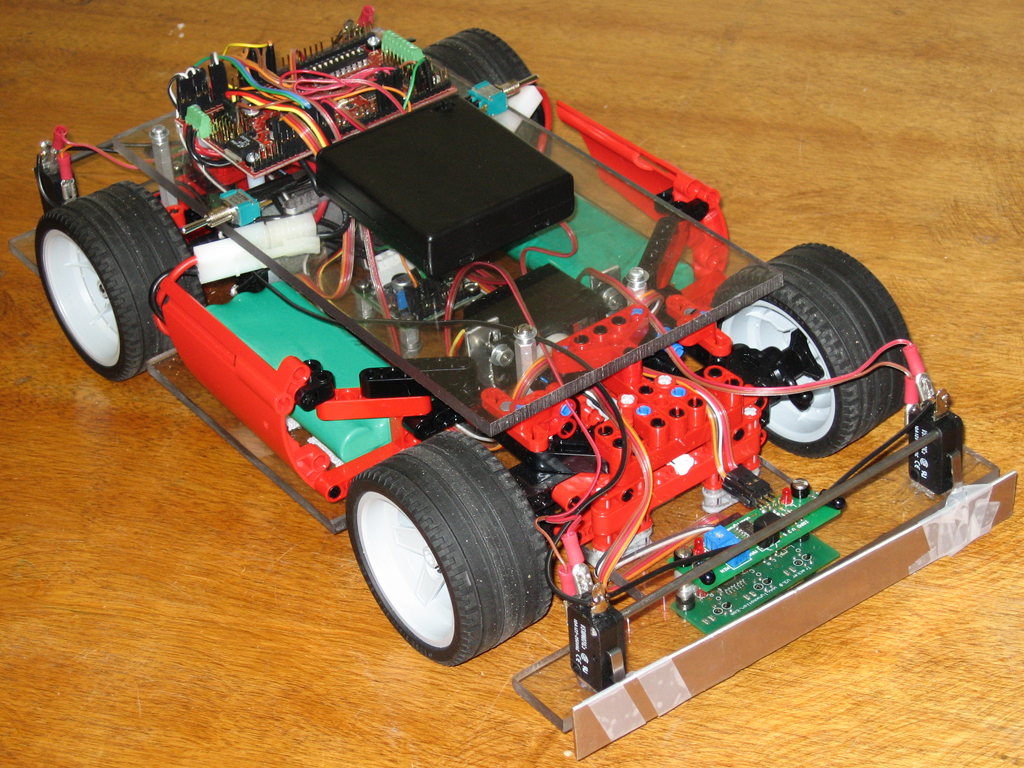
Kyle Carithers | Ferrarobot is a high speed, line following, car like, drag racing, robot. Ferrarobot demonstrates its intelligence by reading a pattern placed beneath it that instructs it on what speed or series of speeds it will follow. |
Final Report
|
Wi-Tesla
|
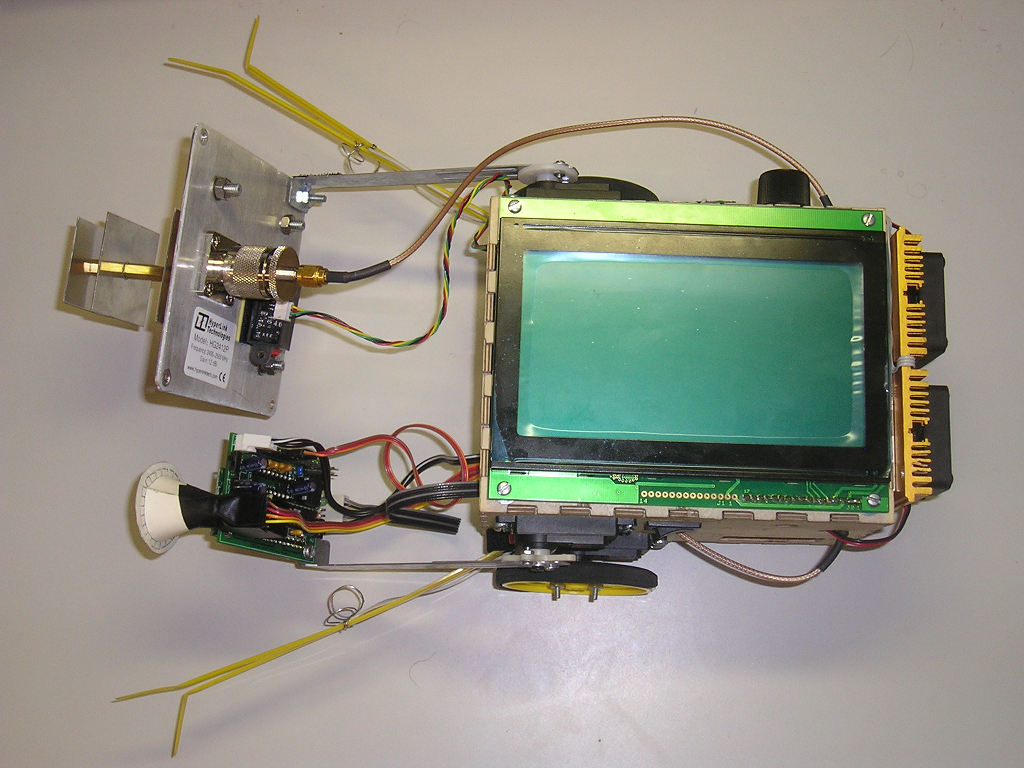
Ed El-Kouche | Wi-Tesla is a robot that has the capability to charge devices via wireless radio frequency (RF) energy. Wi-Tesla has an on-board RF generator that produces a 2.4GHz sinusoidal waveform with a high output power. This waveform is fed into a high directional antenna that would radiate the energy in the direction of the device to charge it. However, Wi-Tesla is not only limited to charging devices, but can also act as a wifi jammer. |
Final Report
|
Barghles
|
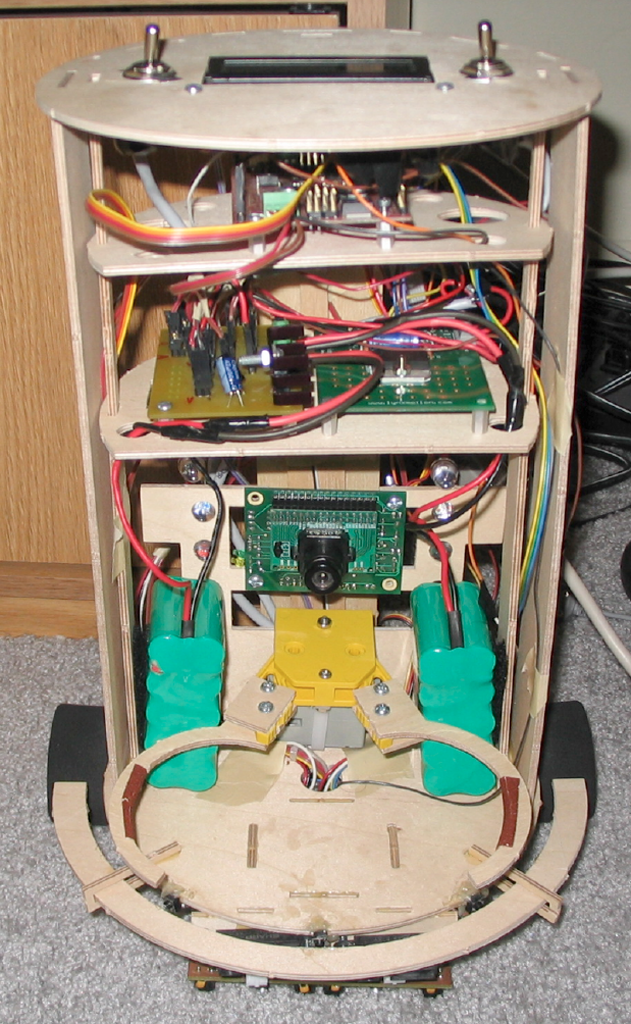
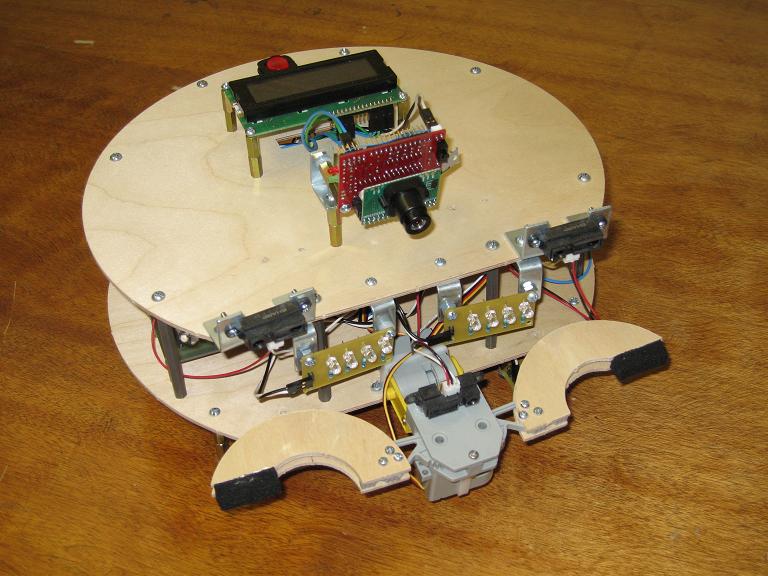
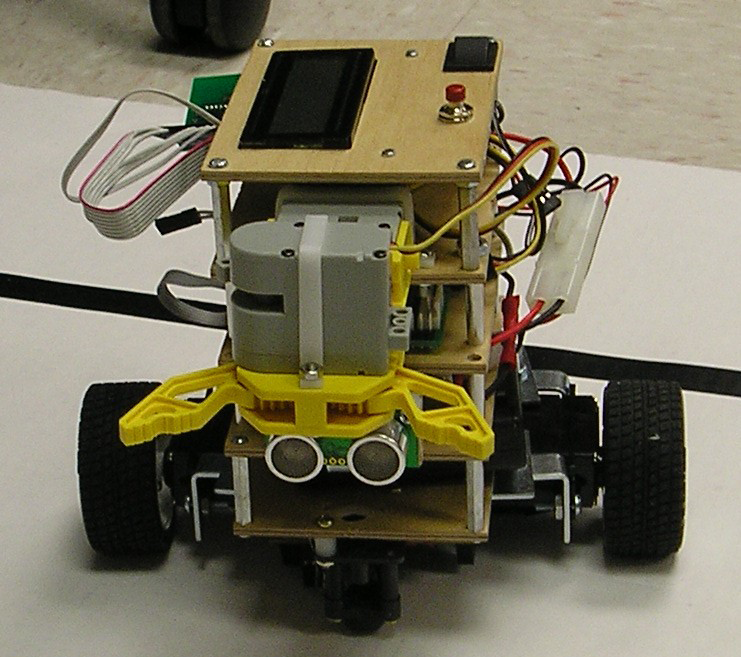
Gorang Ghandi | Barghles is an autonomous soda retrieving robot. A remote control will tell Barghles what type of soda to deliver. Barghles will follow a line while avoiding obstacles to deliver the soda and then return home. |
Final Report
|
Casaroba

|
Otto Goethals | Casaroba is an automated modern version of Casanova; he is the best friend to socially awkward engineers everywhere. Casaroba finds people and uses his smooth talking and listening abilities to obtain phone numbers and to charm guys and gals. |
Final Report
|
LawnGator
|
Michael Gregg | LawnGator is an autonomous lawnmower and lawn maintenance system. |
Final Report
|
Alarm-o-bot
|
Andrew Joseph | Alarm-o-bot interacts wirelessly with an alarm clock. When the alarm clock goes off, the snooze button on Alarm-o-bot must be pushed in order to use the snooze function. Alarm-o-bot then hides itself based on low light intensity (while avoiding obstacles) and the user must get out of bed to hit the snooze the next time the alarm clock goes off. Repeats every time the snooze is used. |
Final Report
Movie |
STAN

|
Drew Lucas | Stan (Stair Traversing Autonomous Navigator) climbs stairs. |
Final Report
Movie |
SwampBoard.Com Bot

|
Foley Ma | The free online text book trading site for UF has gotten better! With a robot that is accessible through the Internet, SwampBoard.Com replaced the textbook middle man with a "middle bot." The SwampBoard.Com Bot autonomously helps students save money by storing books students are selling, and retrieving books when students are buying. At last, students can now get their textbooks at their own convenience, 24/7. |
Final Report
Movie |
LAWS-V
|
Asundi Sharan | Laws-V (Linux-based Autonomous Wireless Self-diagnosing - Vehicle) is capable of doing obstacle avoidance and object tracking using IR sensors and photoresistors, respectively. The robot has a PC104 processor board running Debian Linux. Laws-V has a wireless card for world access. |
Final Report
Movie |
Helper
|
Bradley Morin | Helper is an autonomous sorting robot. Helper locates and sorts objects of different colors. |
Final Report
Special Sensor |
Lab Rat

|
Daniel Parker | Lab Rat (short for Labyrinth Rat) will autonomously navigate a maze. |
Final Report
|
Wally
|
Ken Rosenthal | Wally is an item retrieving robot. A user or consumer will tell Wally what item(s) in a warehouse it wants. Wally, based on RFID, will enter the warehouse and locate the items, pick them up, and place them at a drop (shipping) point. This type of robot is ideal in an industrial environment where 24 hour order processing is desired. |
Final Report
Movie |
Earl

|
Etan Shaul | Once placed on top of a table, Earl will manage to find an edge (without falling off) and lower himself to the ground by rappelling off the opposite end. |
Final Report
|
Awesimo
|
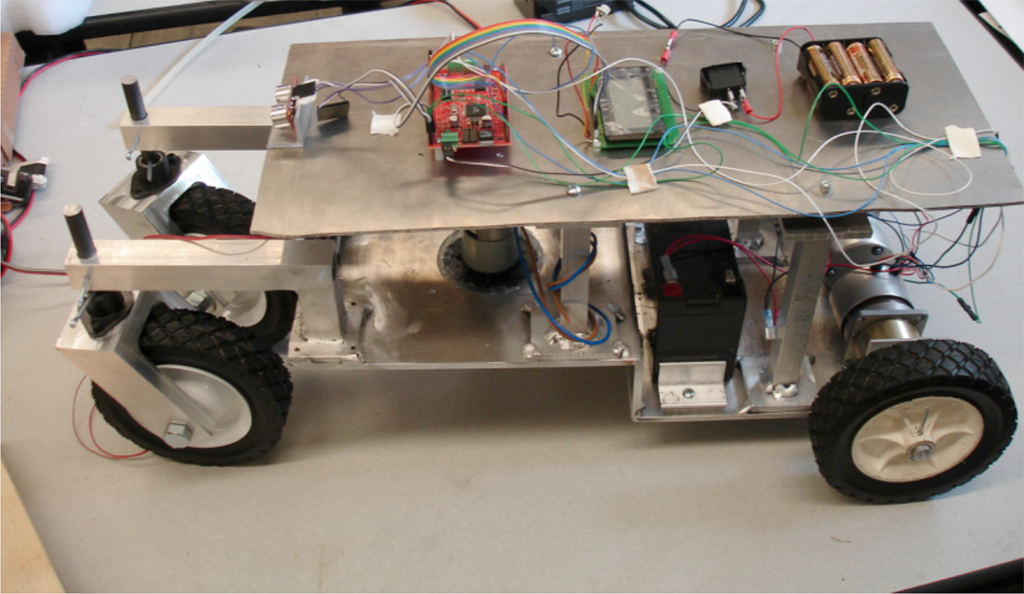
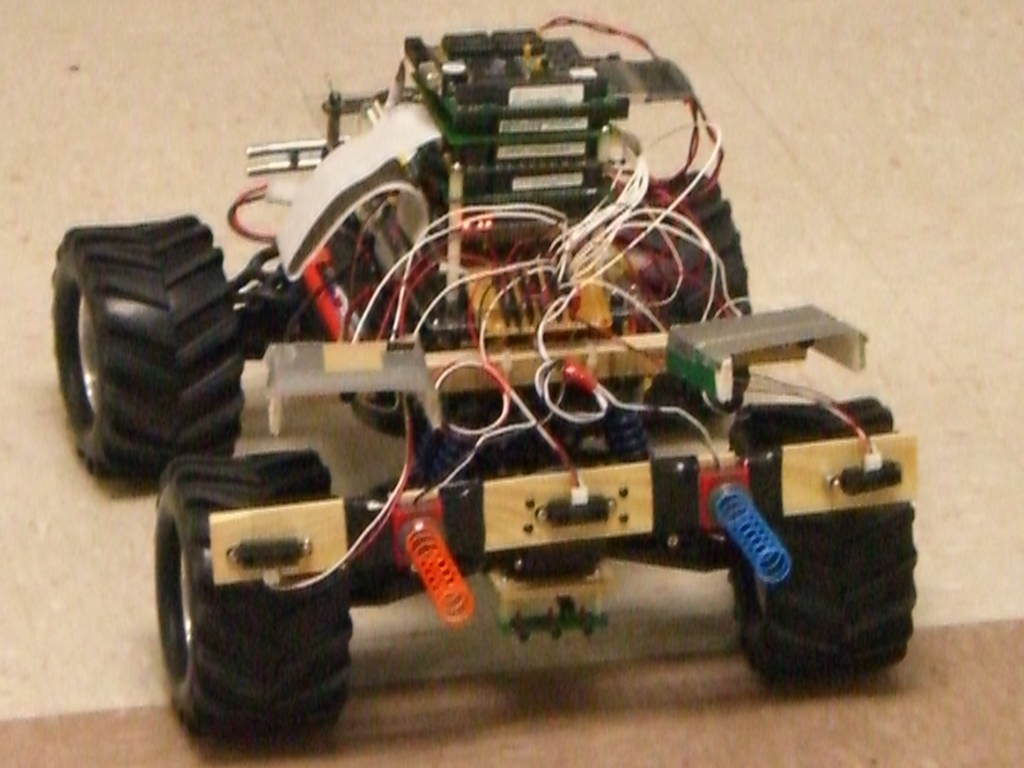
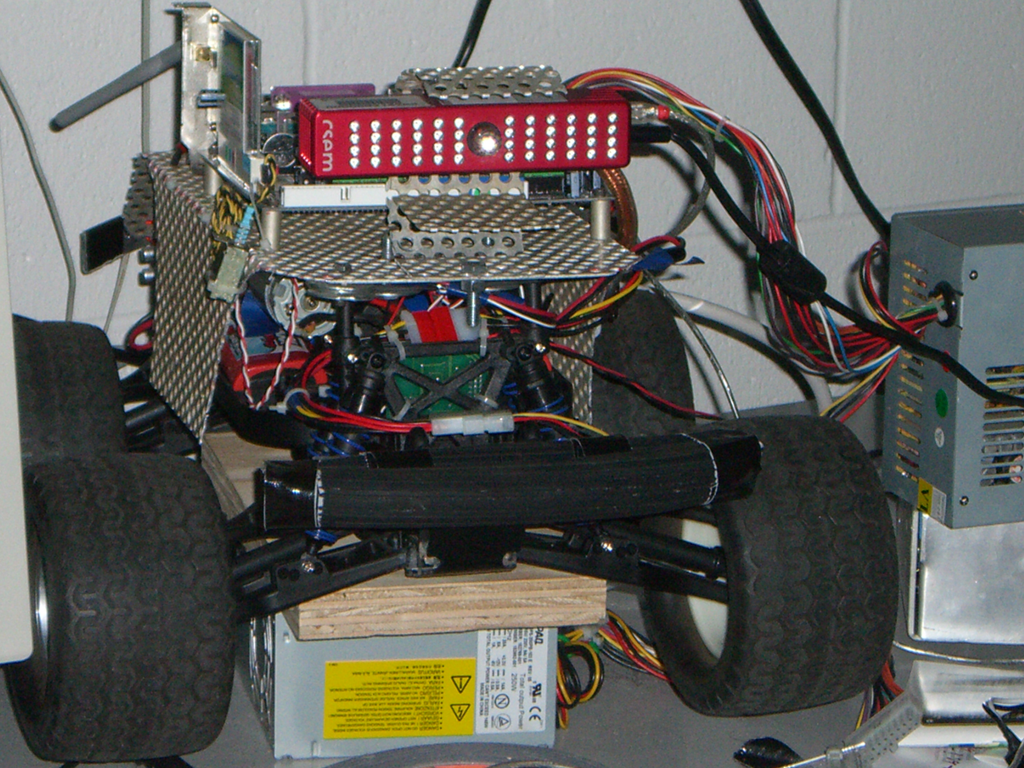
Andrew Waldrum | Awesimo (Autonomous Wheeled Experimental System for the Investigation of Multiple Objectives) is a modified RC monster truck that will wander the landscape, avoiding obstacles, and visualizing a 3D Range image of the world that will be transmitted to a remote computer and either projected or displayed on a big screen TV. |
Final Report
Movie |