| Robot | Creator | Description | Final Paper |
BillyBall Bot
|
Tsang-Wei (Dan) Huang | BBB will find the basket, line up with the basket, and shoot a nerfball into the hoop, hopefully. Then it will move randomly in the open court, avoiding obstacles, and wait for me to give it the ball. |
Final Report Special Report |
Atlas
|
Jay Cushing | Atlas is a mapping robot. He will track the perimeter of a room and wirelessly transmit data to a laptop. The laptop will generate a map of the room. |
Final Report Special Sensor |
Gimp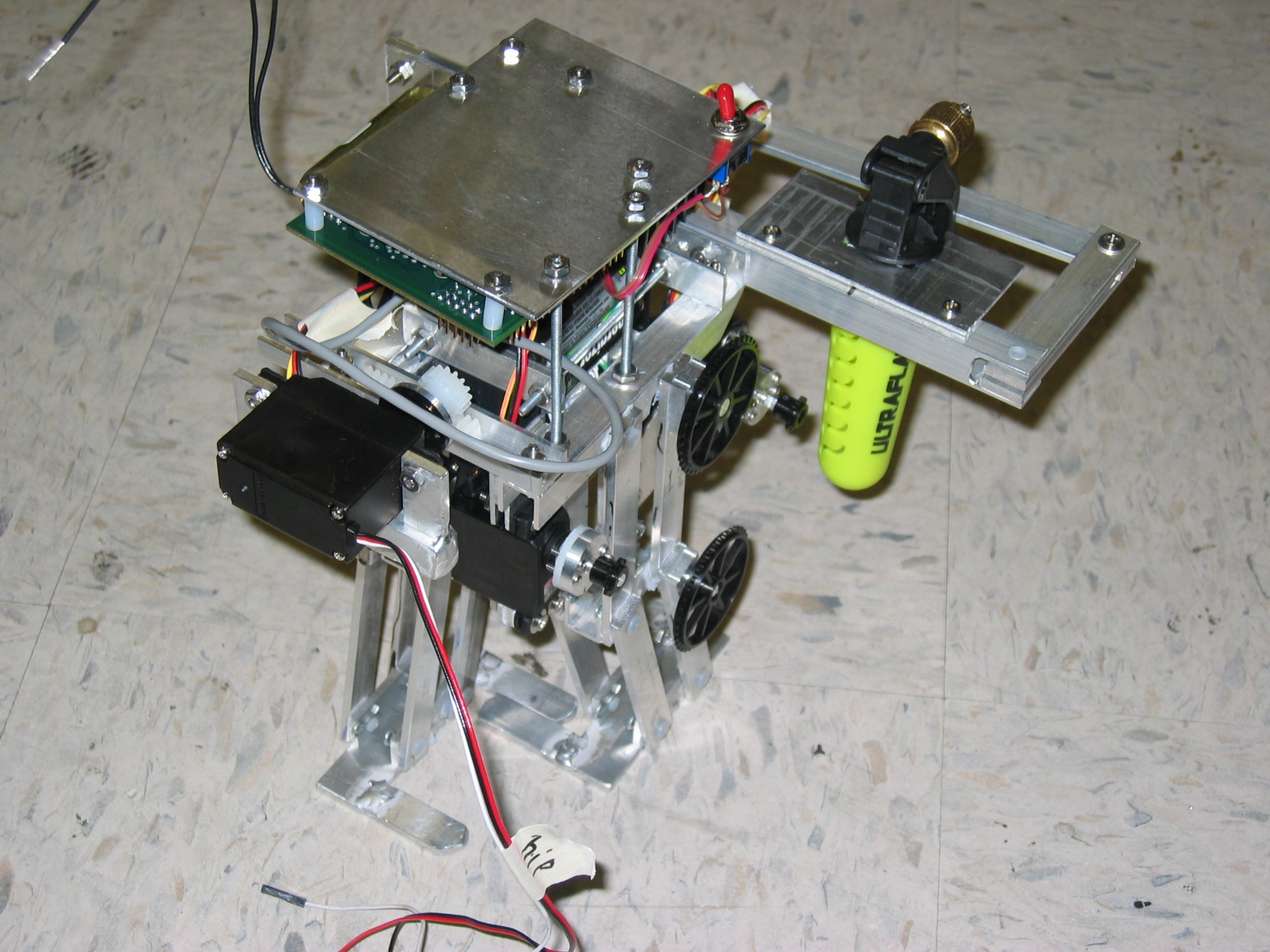
|
Stephen Corbett | Gimp will search for an open flame, move to a position close to the open flame via two legs and extinguish it. |
Final Report Special Sensor |
Fupa
|
Jeffrey Cohen | Fupa will follow a high contrast line and stop at cans placed along track. Fupa will then analyze the color of the can it stopped at, and light up the corresponding colored LED. Also, FUPA will knock over all red cans with an extending arm. |
Final Report Special Sensor |
NavBot
|
Kosala Kodikara | The robot will map a room and plus a single simple object in the room . The robot will transimit the informtion back to user and the user can give commands to the robot. |
Final Report Special Sensor |
2-Inch Worm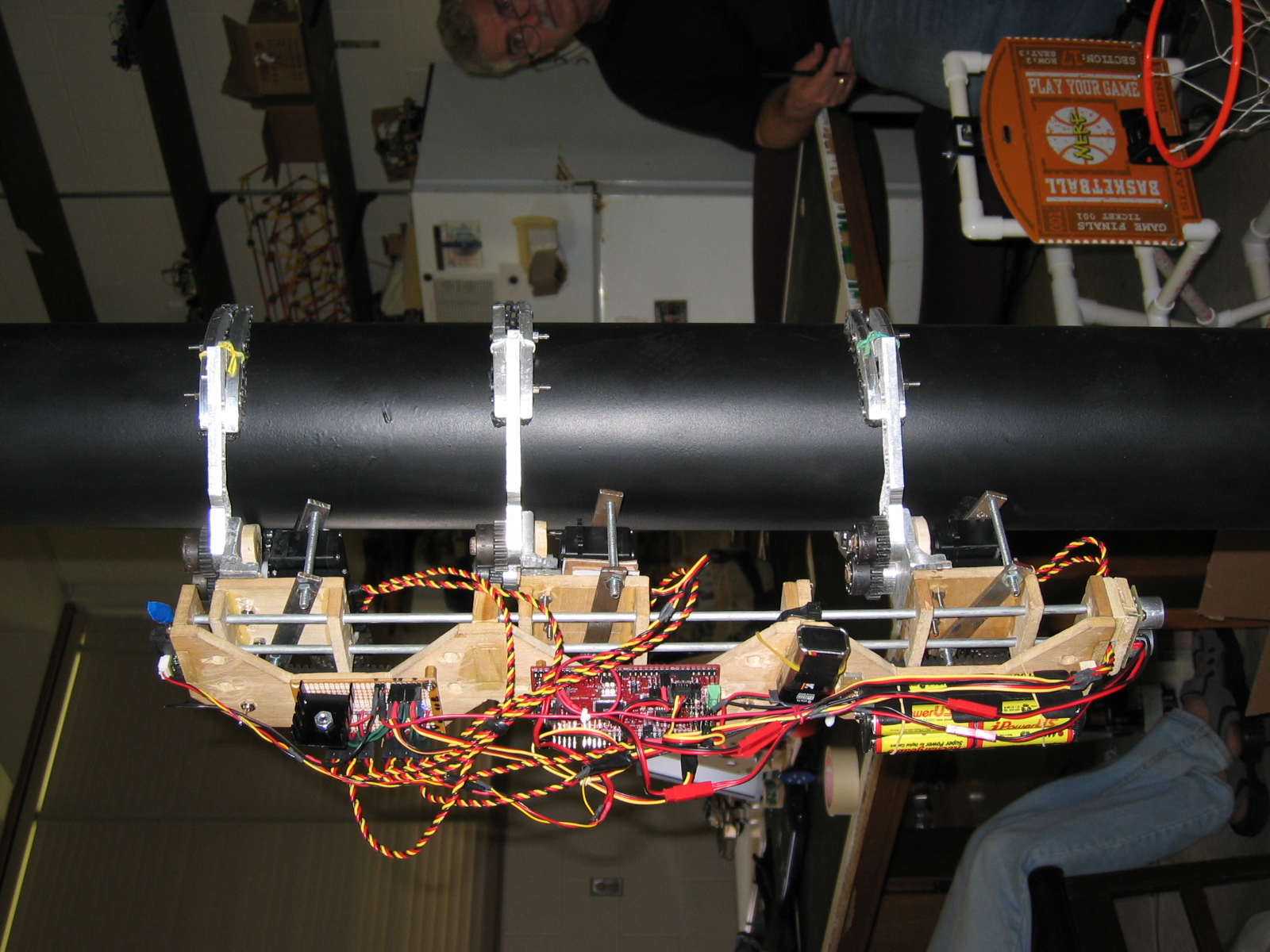
|
Chris Conger | 2-Inch Worm will climb up trees and telephone poles, then climb back down and tell you how high it got. |
Final Report Special Sensor |
BoB the Builder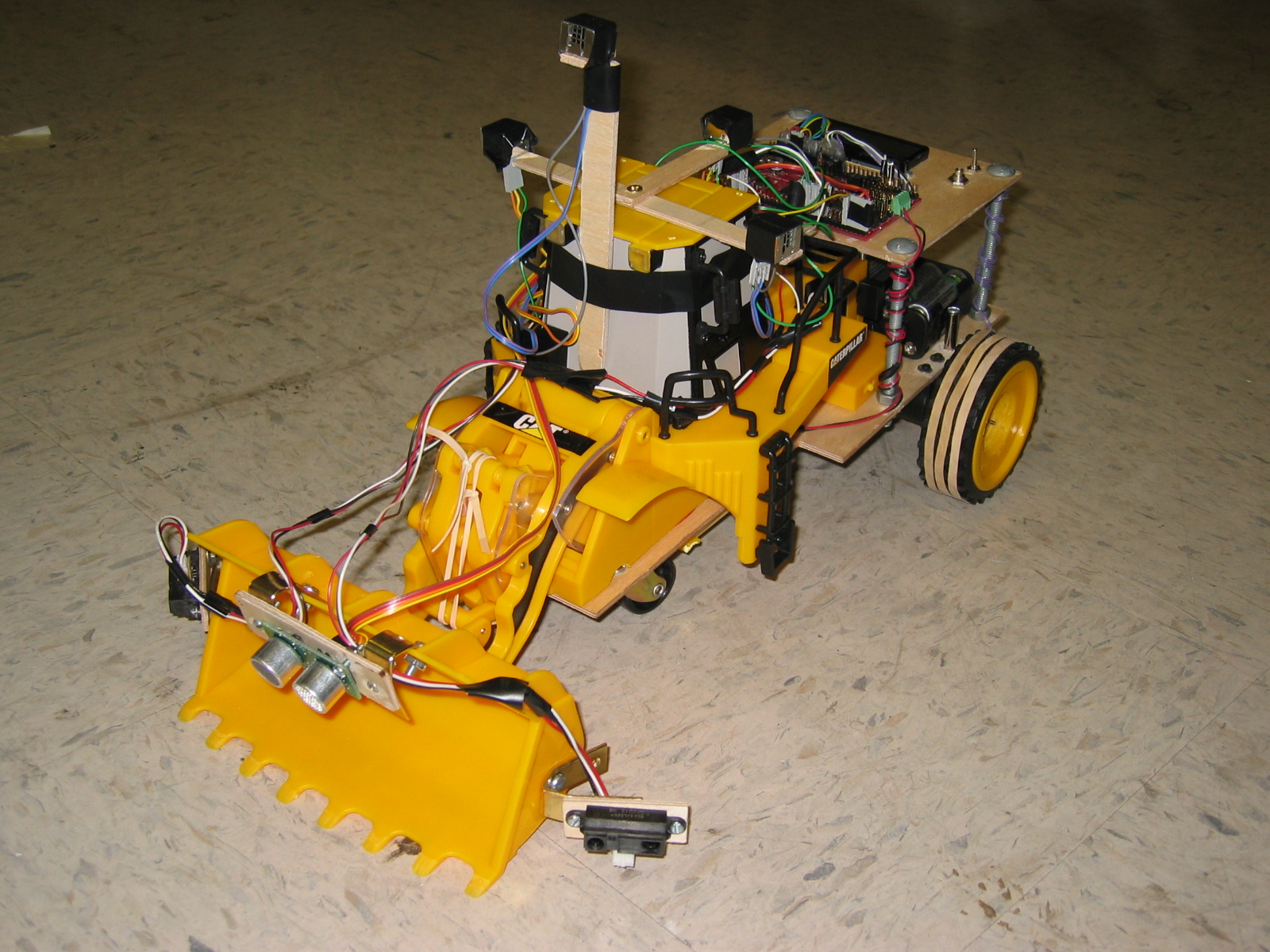
|
Salman Siddiqui | Bob will scan its environment, go to the nearest object, pick it in its shovel and then head towards a designated dumping area to dump it. It will return to its original location to pick up some more. |
Final Report Special Sensor |
balBot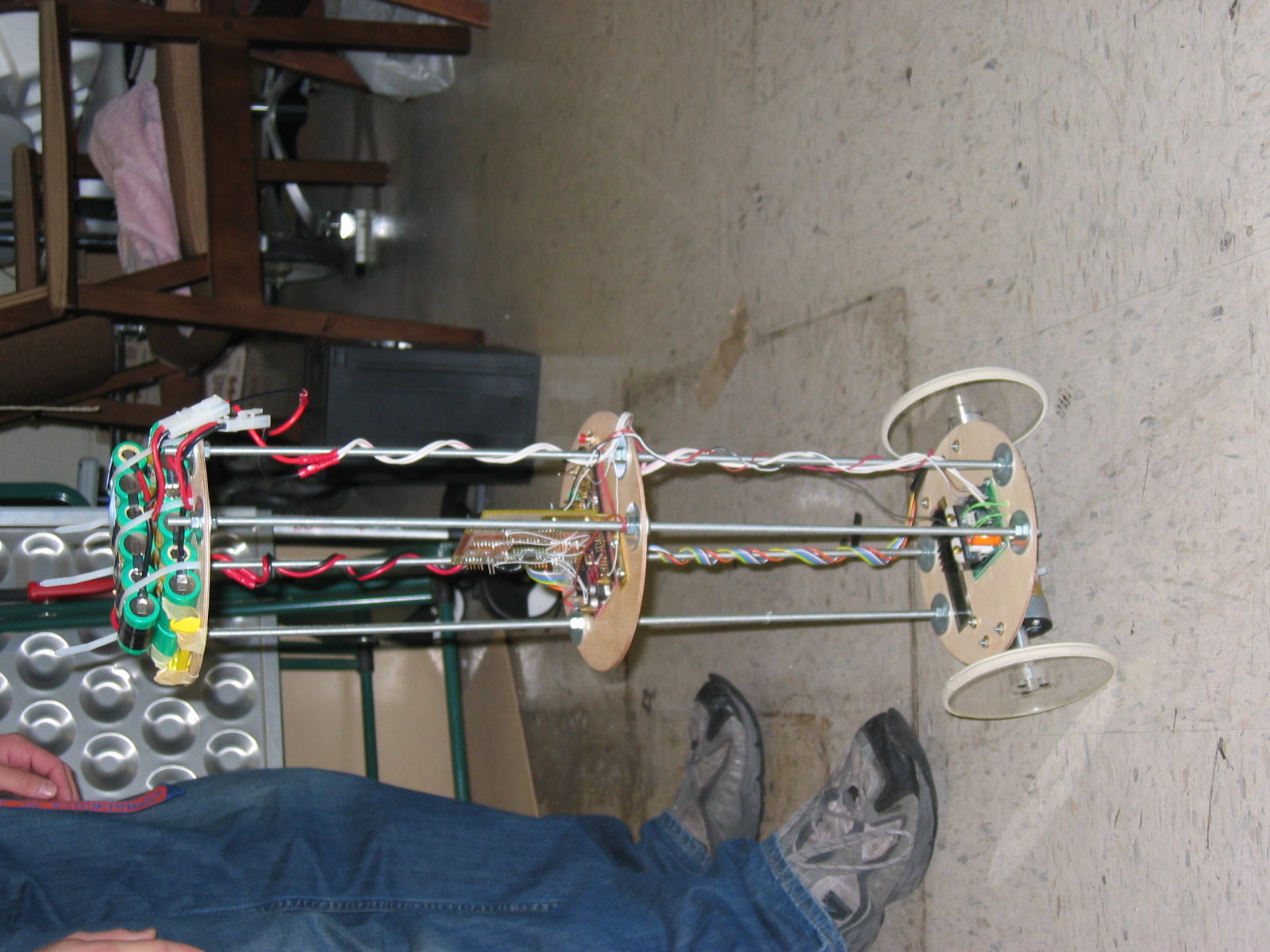
|
Arturo G. Codina | balBot is a two-wheeled self-balancing robot that will roam around a room while maintaining his balance. |
Final Report Special Sensor |
F.L.A.M.E.
|
Robert Lee | FLAME (Fire Locator And Mechanized Extinguisher) will detect if fire is present and attempt to extinguish it. |
Final Report Special Sensor |
Staple-It
|
Cyrus Abbaschian | Staple-It will navigate a 2-D surface and insert staples along a heated wire without any human interaction. Abstractly, this simulates stapling a surgical incision. |
Final Report Special Sensor |
MARVIN
|
Bryan Davis | MARVIN (Mobile Autonomous Roving Vehicle with Integrated Navigation) will receive commands wirelessly from a master computer to move to an arbitrary location in a room. If any obstacles are in his way, he will attempt to go around them and still reach the requested location. |
Final Report Special Sensor |
Cabby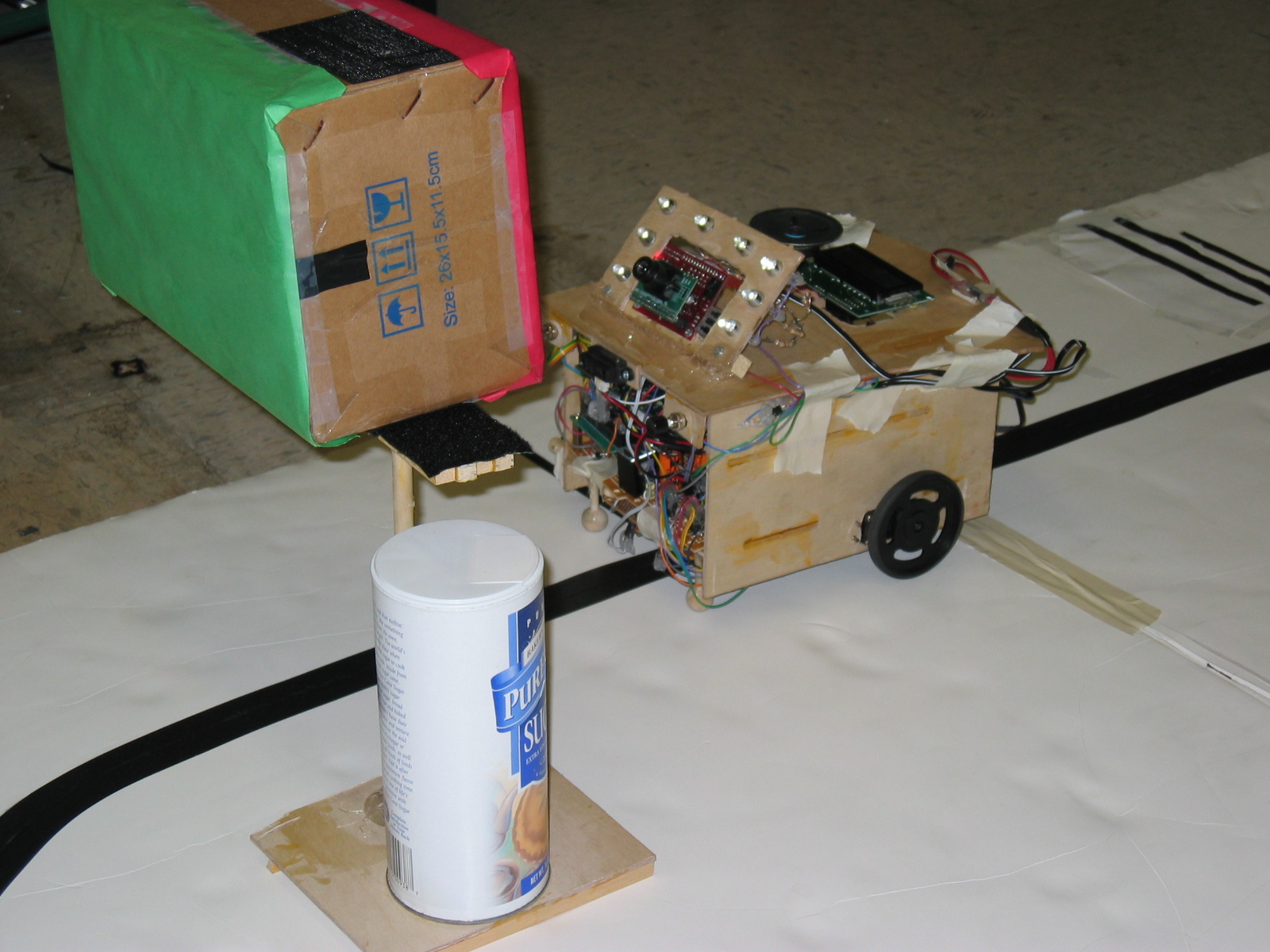
|
Robert Fennell | Cabby is an autonomous taxicab robot. Cabby can follow a street and drive to the desired location that is spoken to it. Cabyy also can distinguish red and green signs and act accordingly. |
Final Report Special Sensor |
ToPSoR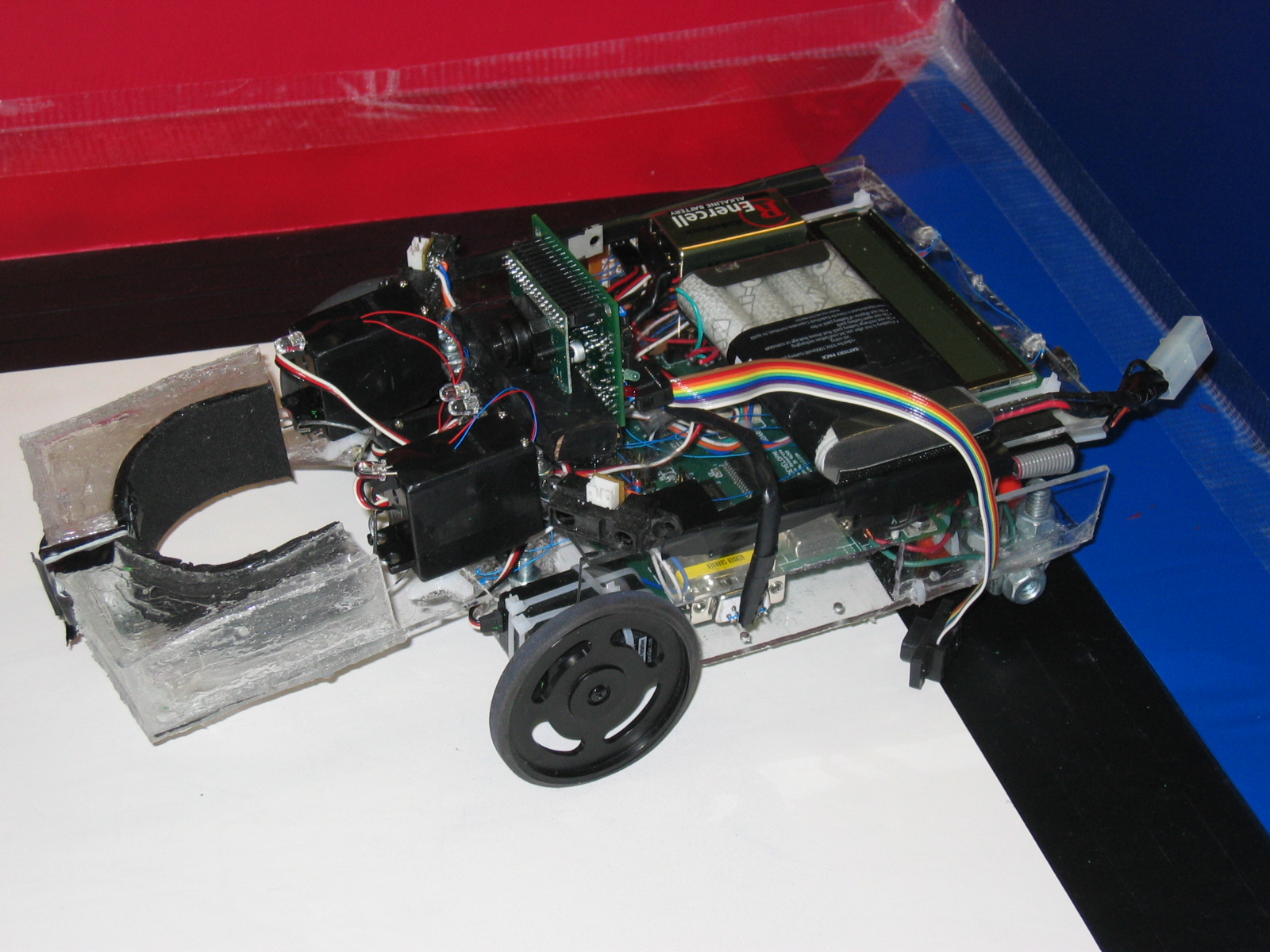
|
Kaveh Nowroozi | ToPSoR will drive around a play area looking for toys (represented by mini soda cans) to pick up and then set them in their appropriate color coded bins placed around the perimeter of the play area. |
Final Report Special Sensor |
Card Shark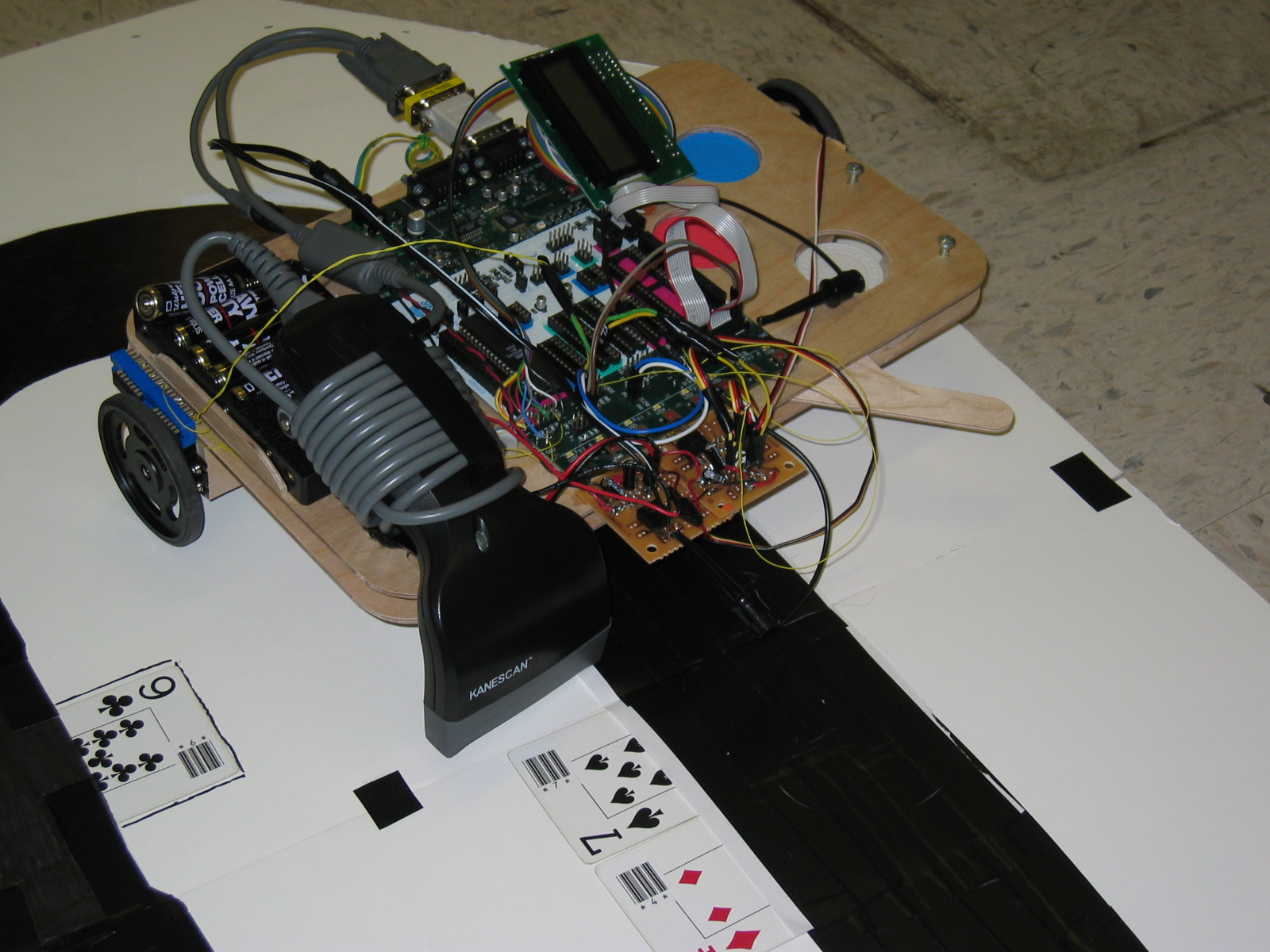
|
Kevin Kane | Card Shark plays blackjack by driving around and reading the dealers cards and his cards. It then makes places bet acording to its best play stratagy. |
Final Report Special Sensor |
ProCoBot
|
Aaron Matthews | ProCoBot will search for a coffee cup. When it finds one it will determine whether it will pour cafinated or decafinated coffe into it by the colour of the cup. It will also know if it needs coffee or not by measureing the amount of liquid in it. |
Final Report Special Sensor |