Change Collector

|
Rafael Garcia
|
The Change Collector wanders around looking for coins on the ground, picks them up, sorts, and counts them. It has a display that shows the total amount collected. The robot can be set to collect a certain amount or a certain coin denomination.
|
Final Report
|
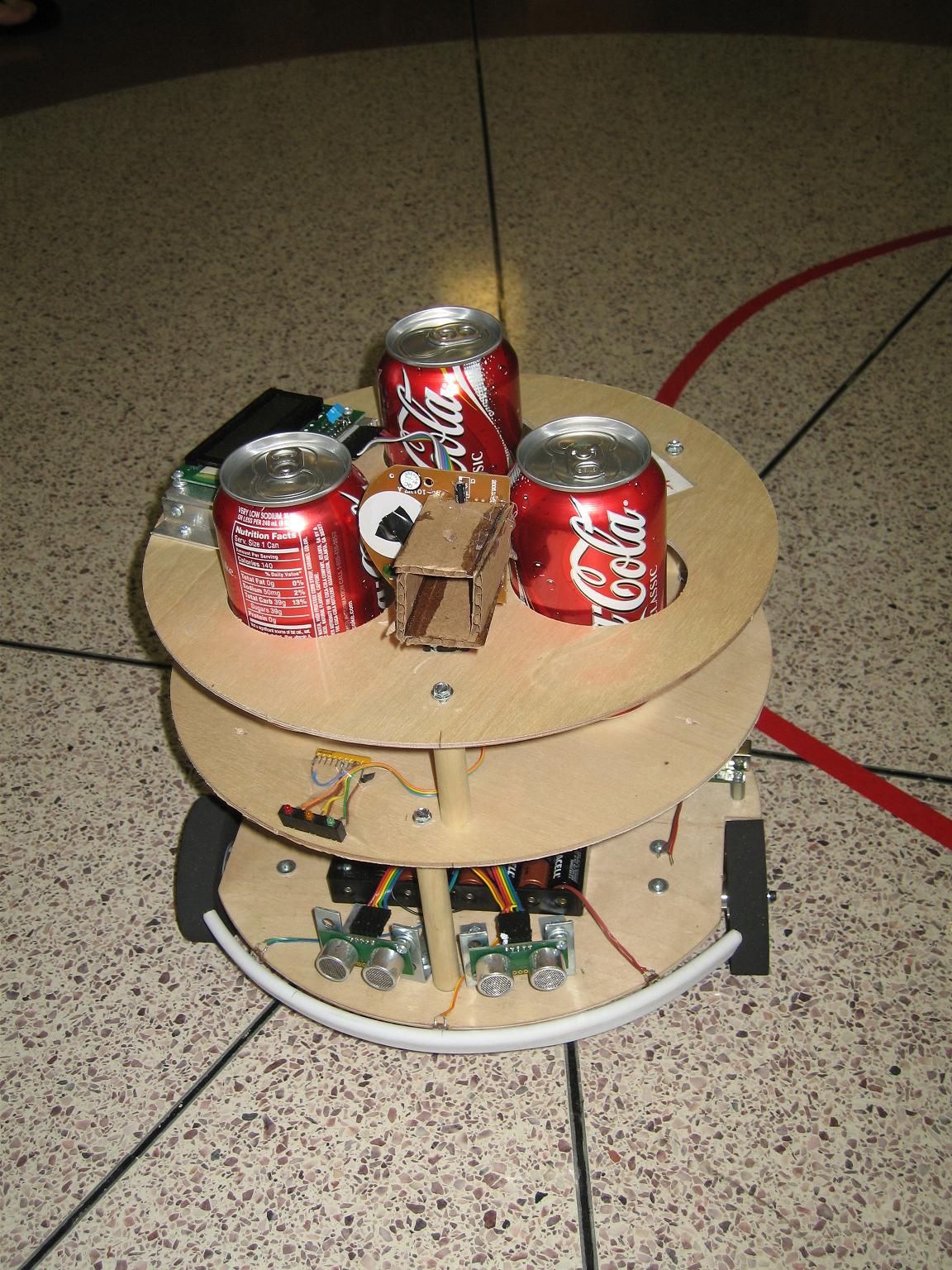
RoBeDeS

|
David Ladolcetta
|
RoBeDeS is a beverage delivery robot. He seeks out people and waits for a beverage to be removed. Then he continues to roam the room using while avoiding obstacles.
|
Final Report
Movie
|
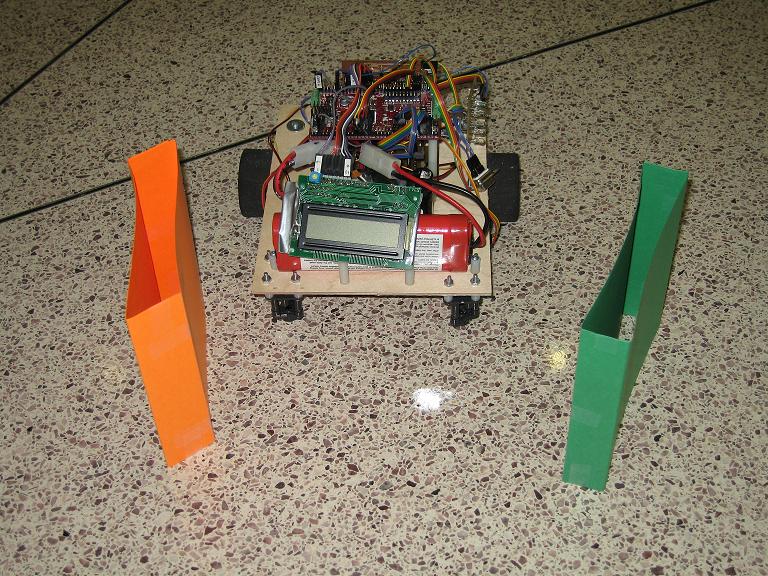
Iktomi
|
Carson Morrow
|
Iktomi is an autonomous, mobile agent designed to exhibit several basic behaviors through the use of color recognition. The robot is built on a two-wheeled, rectangular platform driven by two DC motors and is capable of detecting and avoiding obstacles and exhibiting attraction or fear in response to specified colors. Iktomi is named after the Lakota trickster god who is considered to be the patron of new technology, such as robots.
|
Final Report
|
WaterBot

|
Chad Fralick
|
WaterBot is an autonomous, household robot that will move around a room watering specific plants that have magnetic panels in front of them. WaterBot avoids hitting obstacles in the process of finding plants and can return home once it is finished watering.
|
Final Report
|
PINO

|
Julian Ramlal
|
Pino is an autonomous ACV (Air Cushion Vehicle) based off a toy R/C hovercraft. It glides over a thin film of air and propels itself by using fans mounted at the rear of the craft. Pino's purpose is to demonstrate that a robot can perform collision avoidance even when working with a frictionless surface with drift.
|
Final Report
|
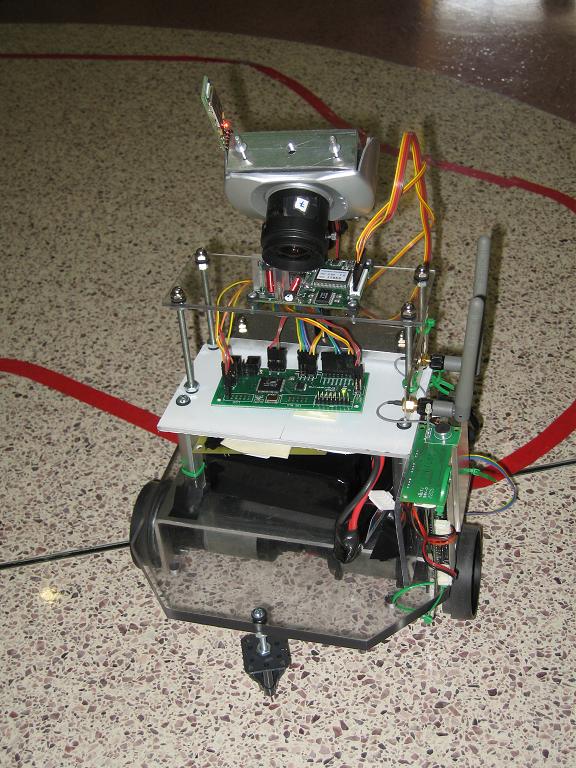
Sir Vide

|
Tom Feeney
|
Sir Vide is a autonomous 2-wheeled indoor mapping robot. A downward-angled camera views a horizontal laser line to determine where the laser falls on objects. By exploiting parallax, the computer can determine how far away all objects in it's view are, map them, then avoid collision with them.
|
Final Report
|
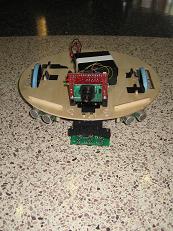
Lunar-cy
|
Bradley Mouring
|
The primary thrust for this project will be exploring the feasibility of creating a vision system that allows more flexibility than currently available systems, including the (in)famous CMUcam. This goal is a means to an end, namely examining a possibility for an improved system for visual location of objects, a common goal of robotic competitions.
|
Final Report
Sensor Report
|
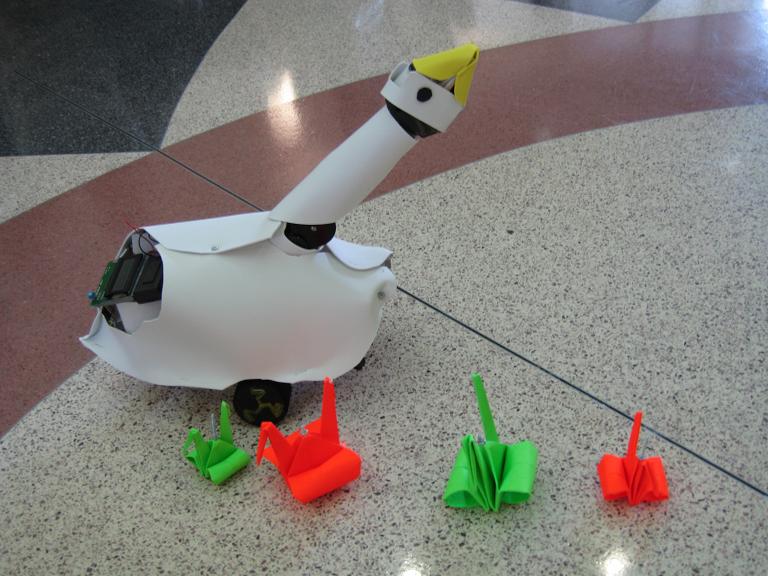
Silly Goose

|
Andrew McCaddin
|
The Silly Goose is designed to navigate its environment searching for objects matching certain color requirements. When it detects an object which matches these requirements, the Silly Goose approaches the object, estimates its height, and picks it up.
|
Final Report
|
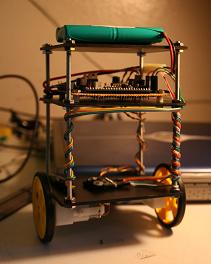
Gyro
|
Joshua Lewis
|
Gyro is a miniature self balancing robot based on the model of the inverted pendulum. He is designed to be small, efficient and highly intelligent. Gyro uses his sofware to fuse accelerometer and gyroscope sensors and estimate his angular posistion and velocity. He uses these variables and a PD control loop to drive his motors and remain upright and stable!
|
Final Report
Sensor Report
|
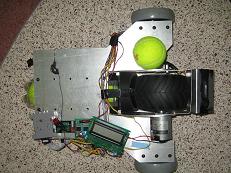
Wimbly
|
Nikolos Burridge
|
Wimbly was built to pick up bright green tennis balls autonomousely while avoiding objects. The rugged aluminum frame protects the not so rugged electronics. This current version of Wimbly uses the tennis balls original packaging as a payload for collected tennis balls (packaging not pictured). Enjoy the pictures and check out the links.
|
Final Report
|
Drama
|
Michael Guidi
|
Drama the robot will, in a sense, act out childrens plays, specifically Little Red Riding Hood and The Wizard of Oz. In doing so, it will demonstate some of the building blocks of robot design, such as color tracking, line following, obstacle avoidance and bump sensing.
|
Final Report
|
PokerGator

|
Ningyuan Ding
|
PokerGator will shuffle cards, find players and deal cards.
|
Final Report
|
Lemmbot

|
Jason Morejon
|
Lemmbot is a autonomous mapping robot. The robot is able to travel in a set area and record the path it traveled. The robot is programmed to travel in a given direction, while avoiding obstaces, and pause at a given distance.
|
Final Report
|