The Machine Intelligence Laboratory (MIL) provides a synergistic
environment dedicated to the study and development of intelligent,
autonomous robots. The faculty and students associated with the
laboratory conduct research in the theory and realization of machine
intelligence covering topics such as machine learning, real-time
computer vision, statistical modeling, robot kinematics, autonomous
vehicles, teleoperation and human interfaces, robot and nonlinear
control, computational intelligence, neural networks, and general
robotics. Applications of MIL research include autonomous underwater
vehicles (AUVs), autonomous water surface vehicles (ASVs), autonomous
land vehicles, autonomous air vehicles (AAVs including quadcopters
and micro air vehicles, MAVs) , swarm robots, humanoid robots, and
autonomous household robots.
MIL's
SubjuGator
is the three time champion autonomous submarine
of the RoboSub AUVSI/ONR underwater competition (2005-2007), and placed in the top 3 in eleven of the 21 years of the competition (including second place in 2012, 2013 and 2014).
MIL's
NaviGator AMS, won the the Maritime RobotX Challenge in Oahu, Hawaii in 2016, our first time in this biennial competition. In 2018, we earned forth place, again in Oahu, Hawaii. We will next compete in the Maritime RobotX Challenge in Sydney, Australia in November, 2022.
In 2013, MIL participated for the first time in the
RoboBoat AUVSI/ONR water surface vechicle competition
with our
PropaGator robot boat; we won! In 2014, we earned second place in the RoboBoat competition.
We also won the static division of the 2011 ION Robot Lawnmower
competition with MIL's
InstiGator robot lawnmower.
In the fall of 2005, MIL physically moved next door to
CIMAR
(The Center for Intelligent Machines and Robotics)
in the Mechanical and Aerospace Engineering Department. We
relocated our lab facilities and faculty offices
adjacent to the CIMAR labs and offices in order to streamline
our collaborations.
With MIL (from Electrical and Computer Engineering Department)
and CIMAR working together, the possibilities are incredible. In 2016, we moved to the adjacent building to the one that houses CIMAR. In 2023, when construction of Malachowsky Hall is complete, we will be move there (about 500 feet from CIMAR).
MIL has always been, and will always be, strongly committed to diversity, equity, and inclusion.
|
Announcements
- The
NaviGator AMS, UF's autonomous maritime system won the 2016 Maritime RobotX Challenge in Oahu, Hawaii. We will compete next at the 2022 RobotX in Sydney, Australia in November, 2022.
- The
SubjuGator, UF's autonomous underwater vehicle (i.e., submarine), will compete next in the 25th International RoboSub Competition in July-August 2022.
- The
PropaGator, UF's autonomous boat, participated for the first time in the 2013 AUVSI Foundation and ONR's 6th International RoboBoat Competition in July, 2013. We won! In 2014, we earned second place in the 7th Annual RoboBoat Competition in July, 2014. We are not sure when we will next compete at this event.
- The
InstiGator, UF's autonomous lawn mower, won first place in the Static Division at the 8th Annual ION Robotic Lawn Mower Competition on June 4th, 2011, in Beavercreek, Ohio.
This competition is no longer active.
- The Urban NaviGator, our robot car created for the DARPA Urban Grand Challenge, by UF and
CIMAR/MIL's Team Gator Nation.
-
Good Morning America (ABC) video
at UF from March 10, 2008 includes footage of our Team Gator Nation DARPA Urban Challenge vehicle.
-
Proposal video of our Team Gator Nation DARPA
Urban Challenge Entry.
- A story about the DARPA Grand Challenge (which included a CIMAR robot
called NaviGATOR) was on the Daily Planet on October 14, 2005.
The
video segment can be seen here
(from the Discovery Channel website)..
-
SubjuGator video for 2005-2006.
- A story about MIL's SubjuGator was televised on Discovery's The
Science Channel (Cox Digital Cable channel 101 in Gainesville) on
Friday, February 10, 2006 at 8pm and 11pm (EST) on a show called
Discoveries this Week.
It also was shown on Feb 10 at 11pm, on Feb 11 at 3am & 10am, Feb 12 at
8pm & 11pm and on Feb 13 at 3am, 9am & 1pm. You can
watch this video here.
I'm sorry about the poor sound quality.
- New to MIL? Join the MILers mailing list
here.
 |

NaviGator AMS is an autonomous maritime system won the 2016 Maritime RobotX Challenge in Oahu, Hawaii. We will compete next in the 2018 competition.
NaviGator ASV is an autonomous water surface vehicle designed on a WAM-V platform and built by undergraduate and graduate students.
|
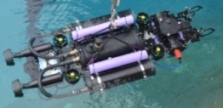 |

SubjuGator is an autonomous underwater vehicle designed and built by graduate
and undergraduate students
of the Machine Intelligence Lab (MIL). SubjuGator has competed twenty times in
the RoboSub competition, placing in the top 3 eleven times including
first place in 2005, 2006 and 2007.
More>>
|
 |
PropaGator
PropaGator is an autonomous water surface vehicle designed and built by graduate and undergraduate students
of the Machine Intelligence Lab (MIL). PropaGator competed for the first time in the AUVSI Foundation and ONR's 6th International RoboBoat Competition in July, 2013 and won! We earned second in 7th RoboBoat competition in July, 2014.
More>>
|
 |
CongreGators
We are developing a swarm of air and ground vehicles, starting with a heterogeneous group (presently three) of hex- and quad-copters and 6 dune buggies...
More (soon?)>>
|
 |
InstiGator
InstiGator is an autonomous lawn mower designed and built by undergraduate and graduate students
of the Machine Intelligence Lab (MIL). InstiGator has competed twice in Annual ION Robotic Lawn Mower Competitions, earning a second place in 2010 and first place in 2011 (both in the static division).
More>>
|
 |
Koolio
Koolio is a traveling autonomous refrigerator robot - featured on MSNBC's
Countdown with Olbermann
on April 21st, 2004. It is designed to autonomously deliver refreshments on
demand (via the web). Unfortunately, it only works in the 3rd floor of Benton Hall at the University of
Florida - which happens
to be thesfloor houses the Machine Intelligence Lab...
More>>
|
|
|