|
Robot
|
Creator
|
Description
|
Final Paper
|
Kyubot

|
Kyuhyong You
|
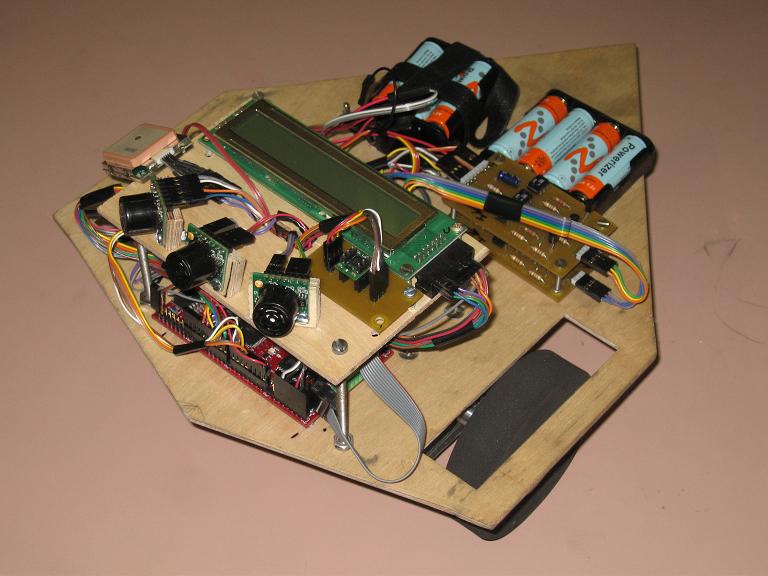
Kyubot is an autonomous navigation vehicle with GPS. Kyubot can be programmed for a series of waypoints, avoid obstacles along the way, and return home. |
Final Report
|
L-Dor: Laser Directed Object Retrieving Robot

|
Michael Arms
|
L-DOR will use an retrieve objects indicated with a laser pointer. She will then look for another laser spot to show her where to take the object. |
Final Report
Movie
|
MuBot

|
Orlando Misas
|
MuBot is an autonomous robot that is able to follow verbal commands from humans. The person controlling the robot will speak into a separate unit that will decode and translate the instruction. MuBot will follow the command as long it is within "logic."
|
Final Report
Movie
|
GrafitiBot

|
Andrew Kobyljanec
|
Graffitibot will roam its territory looking for clean surfaces to deface. If it spots a rival's 'tag' color, it will paint over it.
|
Final Report
|
Shift

|
Jason Wishnov
|
Shift is a robot and a game. The robot serves as the primary mechanism in a two-player card-based strategy game. The goal is to place cards in such a fashion as to lead Shift (the robot) to a specific designated area for each player.
|
Final Report
|
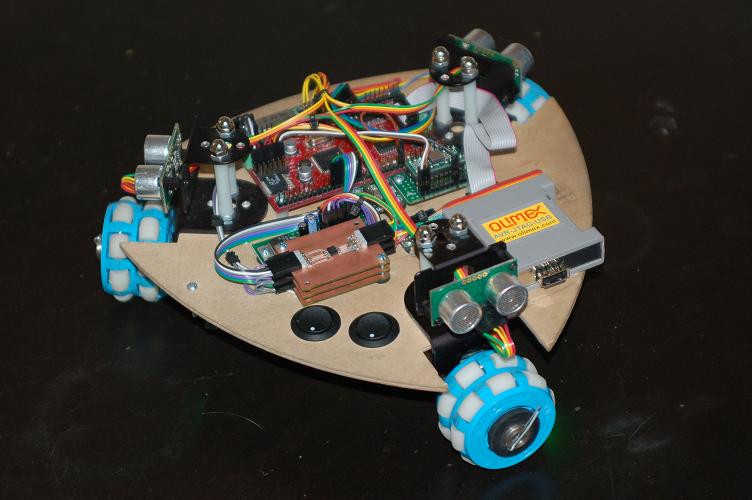
CRAB: Catch and Return Autonomous Bot
|
Steven Buss
|
Crab uses a holonomic drive train to move in any direction without turning. He sees moving objects and chases after them. If he gets too close to any object it will back up to ensure its safety.
|
Final Report
|
Rack Attack

|
Barry Solomon
|
Rack Attack, once place upon a pool table, will navigate its way along the walls of the table, stopping at each pocket, and retrieving the balls. Rack Attack will pull the balls out of the pockets and place the balls in appropriate positions in an specially designed rack.
|
Final Report
|
RoboPost

|
Kim Wright
|
Snail mail is finally receiving an upgrade, thanks to the development of RoboPost, the robotic mailbox. RoboPost will look like an ordinary mailbox, but with one major difference; after the mail is delivered, he will lower himself from his stake and automatically drive up to his charging base near your doorstep. From here, you can easily retrieve the mail or place outgoing letters into the mailbox. After it has recharged its batteries, RoboPost automatically returns to his street-side position.
|
Final Report
|
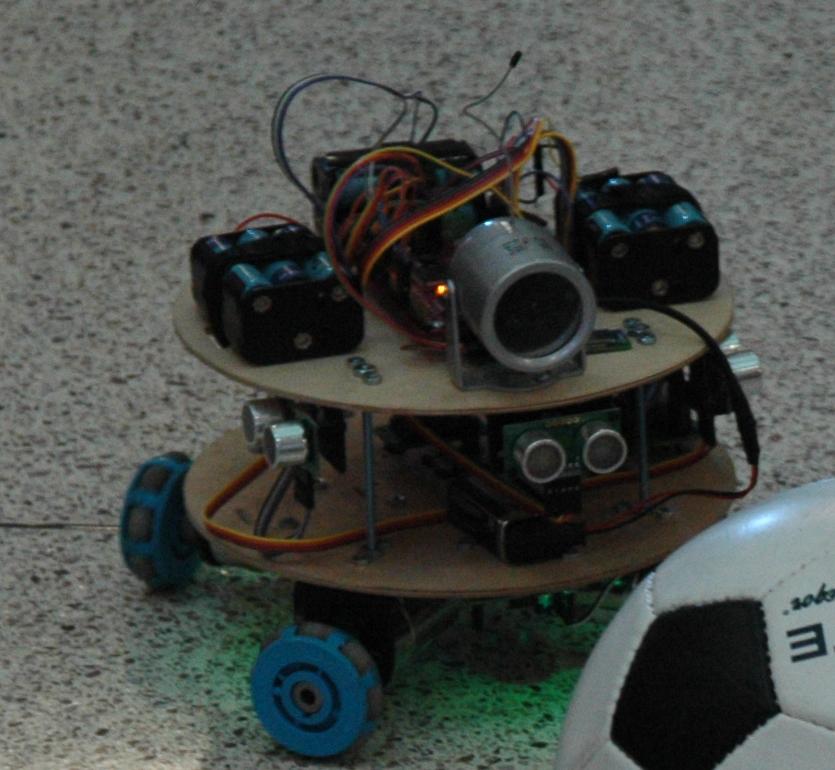
John Paul Jones

|
Chris Kleinknecht
|
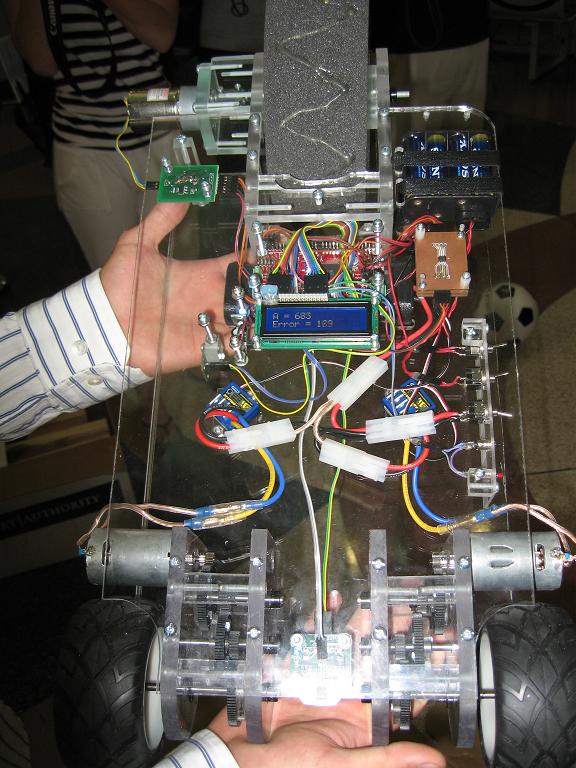
John Paul Jones will perform simple obstacle avoidance and intelligent evasion of multiple predators. He will use an inertial navigation system and omnidirectional wheels to effect holonomic motion, and multiple sonars to detect predators and obstacles.
|
Final Report
|
Search and Destroy

|
Gram Slingbaum
|
Search and Destroy tracks the an enemy (by identifying his uniform). He will turns appropriately, gauge the distance, and launch a pin pong ball to eliminate the threat.
|
Final Report
|
Sky Riser
|
Jeffrey A. Lettman
|
SkyRiser is an autonomous platform to assist in onsite building construction. Tracking around a construction site, SkyRiser will locate studs behind pre-hung sheet rock and secure them in place with anchor screws positioned at a set number of vertical heights. |
Final Report
|
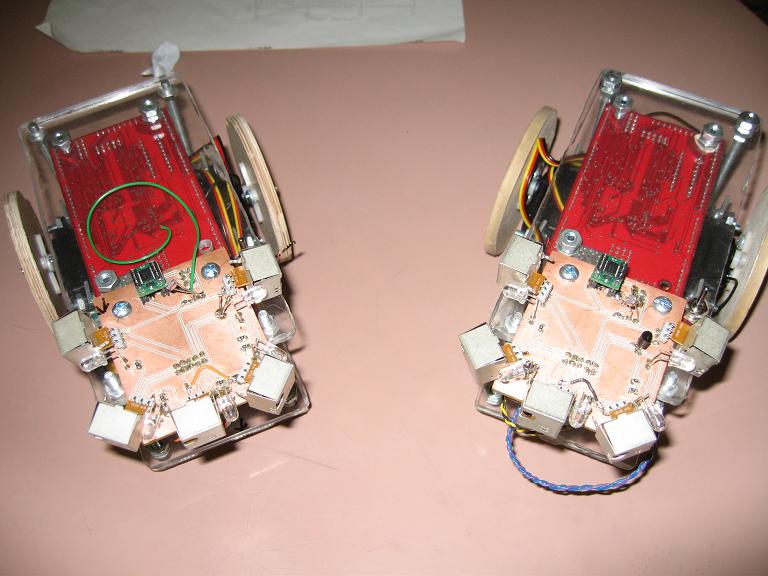
SwarmBot

|
Alexander Weinert
|
SwarmBot is meant to be as simple and cheap as possible, yet still exhibit swarm behavior. He is driven by 2 servos, and has a simple box like body. He has two PCBs, one includes the microprocessor and power regulation, and the other contains the sensors. The sensor package consists of a CdS cell, 5 IR range finders, and a magnetic field sensor (compass).
|
Final Report
|
Search-n-Fetch

|
Koushik Kalyanaraman
|
Search-n-Fetch locates and fetches balls of a given color.
|
Final Report
|
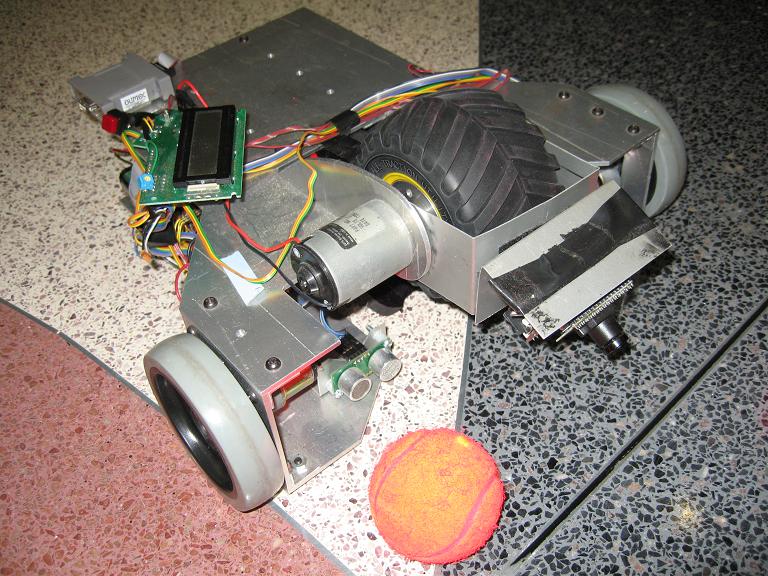
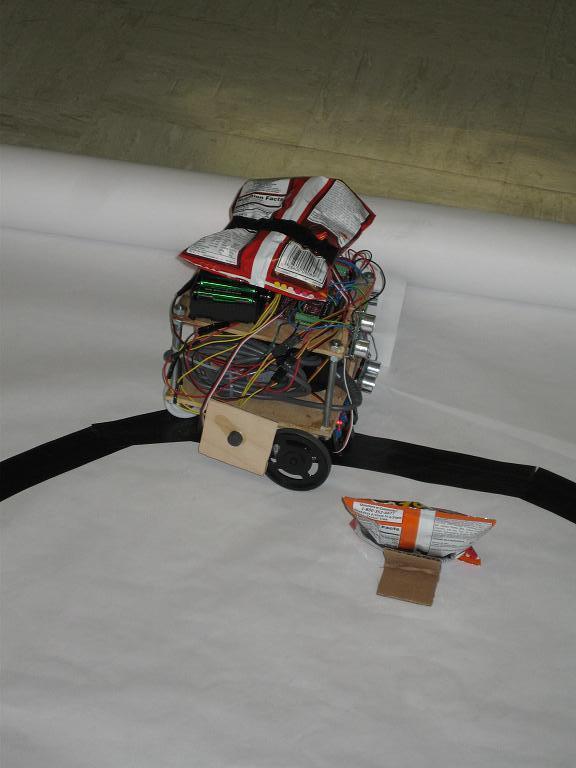
Anna Kournikova
|
Nikolas Burridge
|
Anna Kournikova is a ball-collecting robot. Anna will locate and collect 5 standard tennis balls at a time and place them back in their original packaging.
|
Final Report
|
GIR

|
Eduardo Beltran
|
GIR will take objects to other rooms in a building based on the weight of the object placed on him. GIR will return to his home base after delivering the object. |
Final Report
|
Butler
|
Matthew Atwood
|
Butler takes a command to get any item needed by the user and then brings the item back to the user.
|
Final Report
|
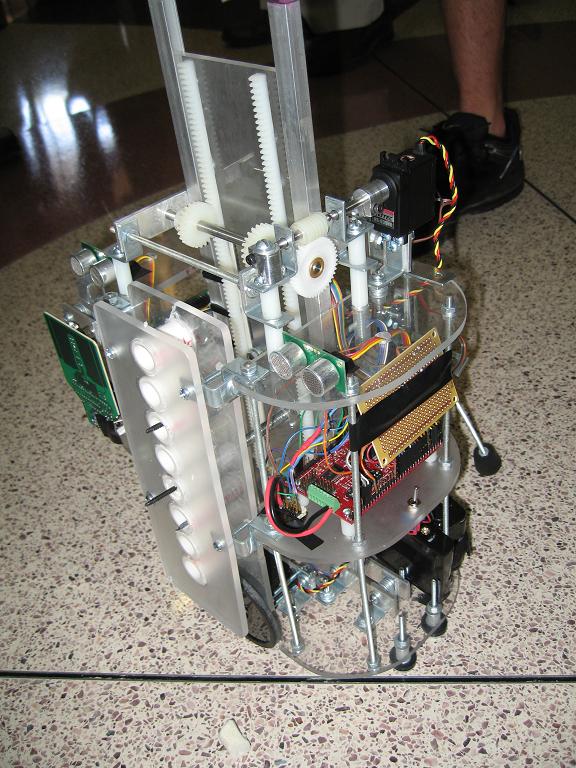
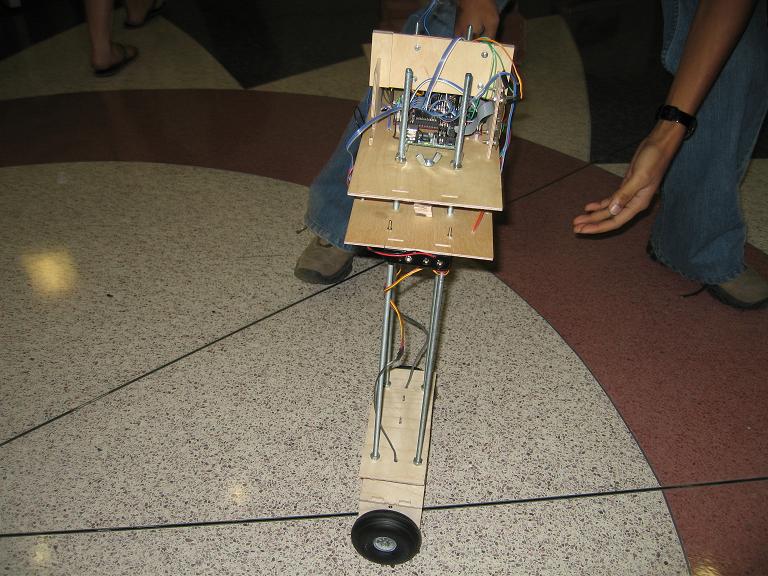
iStand
|
Subrat Nayak
|
iSTAND is a two wheeled self-balancing robot. He senses tilt data using a an inertial reference sensor made up of a piezo gyro and an accelerometer; he also uses an optical encoders. To balance, iSTAND moves in the direction of the fall at a particular speed and torque determined by a PID controller. iSTAND can also wander around avoiding obstacles while maintaining his balance. |
Final Report
|
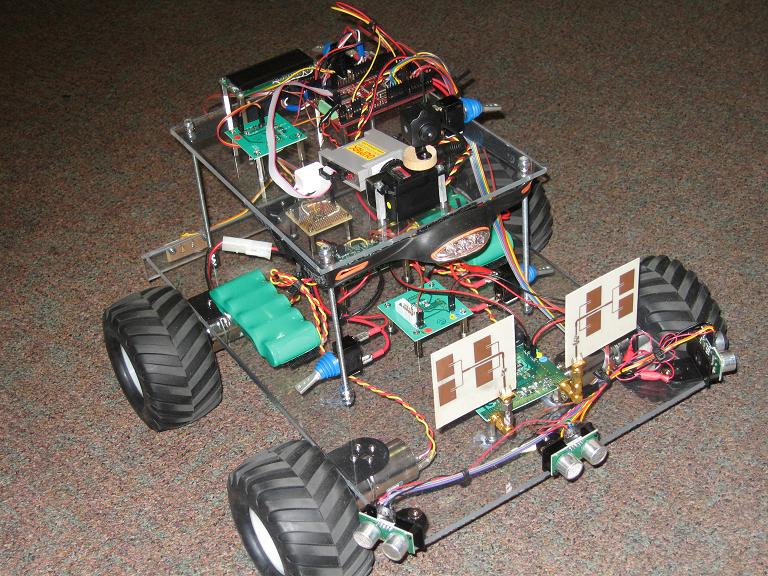
Vital-Bot
|
Gabriel Reyes
|
Vital-Bot is an autonomous search-and-rescue robot capable of operating both inside and outside. He will roam around a certain area until he encounters any obstacles; Vital-Bot will then come to a halt and use radar signals from its vital signs sensor to scan the area for human presence. He will transmit the radar signals back to a base station, allowing respiration rate and heartbeats to be measured if a human is detected.
|
Final Report
|
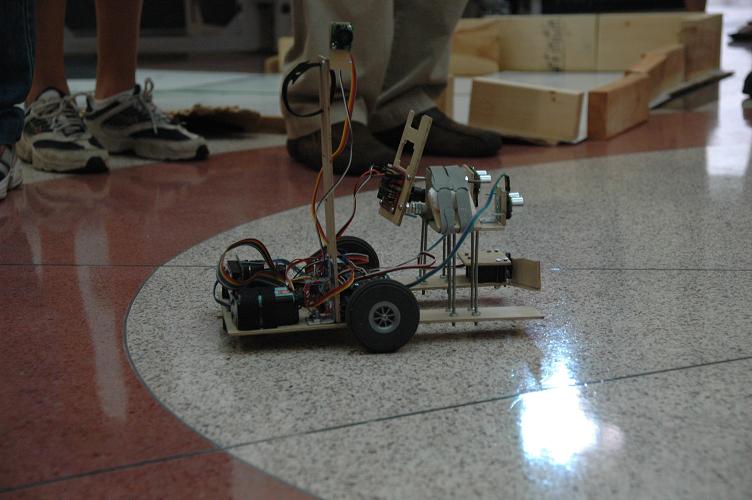
Buzzed: The Balancing Robot
|
Andres Vargas
|
Buzzed (the balancing robot) is a robot that uses and IMU, consisting of an accelerometer and a gyroscope, to maintain a balanced state as he moves back and forth. Buzzed will start by laying on the ground. With the aid of a third wheel, Buzzed will drive itself to a wall, stand itself up, and roll away balancing. Buzzed will run through a sequence of movements, once he balanced, to demonstrate capabilities while maintaining an upright position.
|
Final Report
|
Ant: Autonomous NavigaTor

|
Tarandeep Brar
|
ANT will move from one pre-determined location to another, guided by variety of sensors including GPS and sonar.
|
Final Report
|
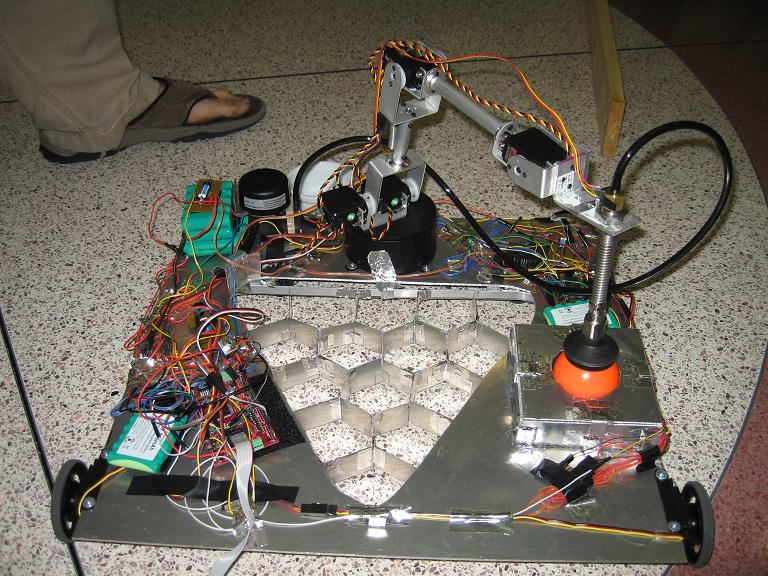
Auto Treasure Finder 5000
|
Philip Sherwood
|
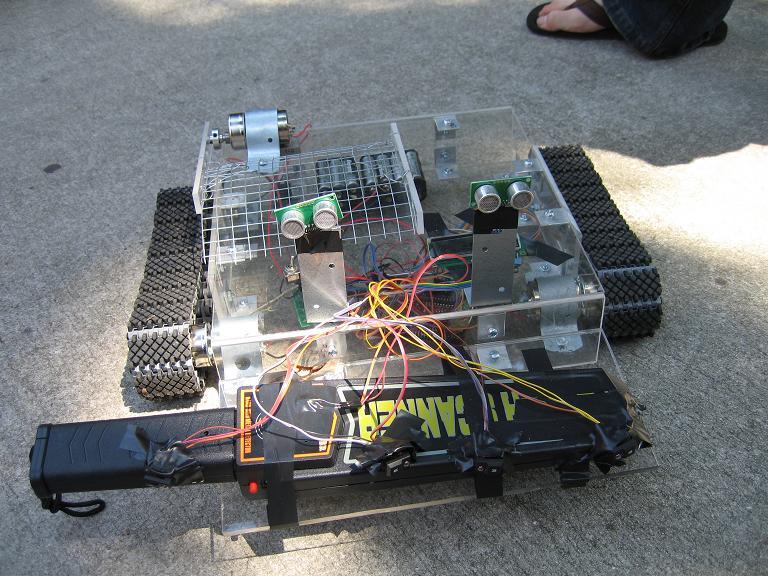
The Auto Treasure Finder 5000 was designed with the lazy, forgetful pirate in mind. Have you ever buried all your treasure only to lose you precious treasure map? Would you rather just lay on the beach catching rays instead of shoveling away for buried booty? That's where the Auto Treasure Finder 5000 comes in. Using a metal detector it will find buried metal and then it will dig into the ground using it's robot arms to retrieve the lost loot. Plunder away!
|
Final Report
|
Frankenstein
|
Tanmay Rajpathak
|
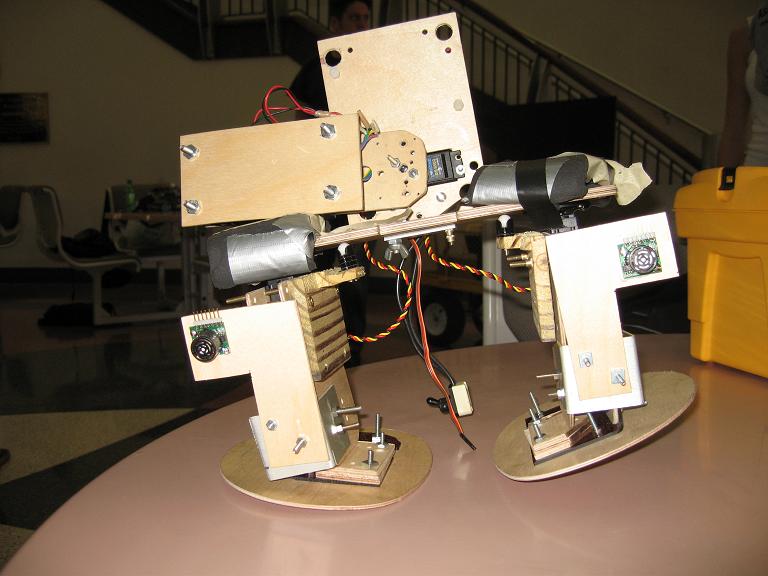
Frankenstein is an intelligent two-legged walking robot that avoids obstacles. His names is due to the fact that he walks without knees, and thus has a gait similar to that of Dr. Frankenstein's monster.
|
NO Final Report
|
Poker Bot

|
Justin McIntire
|
Poker Bot is an autonomous robot that retrieves all the cards off of the table after a poker game. After this task is completed, he deals out the next hand so the following round can continue.
|
Final Report
|
MickeyBot
|
Nicholas Wulf
|
Like most dogs, MickeyBot's likes to play fetch. MickeyBot will locate a ping pong ball, pick it up, and bring it back to his buddy; MickeyBot will then toss the ball up into the air so his friend will not need to bend over to retrieve the ball from Mickey's grasp.
|
Final Report
|
ParkingBot

|
Rohan Pais
|
ParkingBot will park itself in a scaled-down parking lot. When left at the entrance of the scaled parking lot, he will search for an empty parking space and then park in that space.
|
Final Report
|
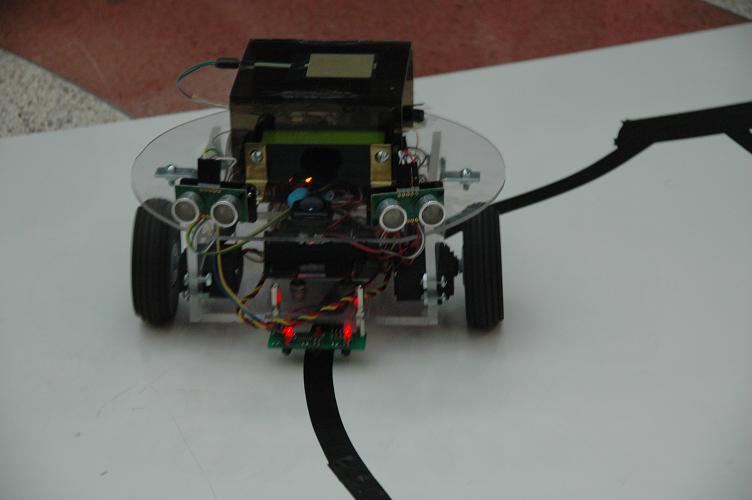
AutoRide

|
Angel Nuńez
|
AutoRide is a line following robot that will do basic obstacle avoidance with the help of sonar sensors. He will also be able to stop at a red light and go on a green one through the use of a hacked web cam.
|
Final Report
|