Jeffery the Tagnificent

|
Alan Schieltz
|
Jeffery is a robot that will play tag with you or any child you would like to keep occupied for a while. The user need only have a tracking device at eye level with Jeffery and he will attempt to run towards you and then away from you once he tags you. |
Final Report
|
CHUMIA

|
Andres Riffo
|
CHUMIA will demonstrates the identification, sampling, and returning of signs of primative life. CHUMIA will find an "rock," identify a GREEN-BLUE target on the the "rock," collect a sample of the target, and drop off the sample a predetermined location. |
Final Report
|
AWIR
|
Andrius Andrijauskas
|
AWIR (Autonomous Warehouse Inventory Robot) will keep track of the warehouse inventory. He will roam the warehouse in a predetermined path (by following lines on the floor) and check the inventory using RFID on each of the containers. AWIR will roam the warehouse using line following. |
Final Report
Sensor Report
|
Cypher

|
Antoin Baker
|
Cypher is an aerial vehicle capable of autonomously taking off, hovering and landing. This platform uses a three axis accelerometer and a dual axis gyroscope to control the roll and pitch of the aircraft. |
Final Report
Sensor Report
|
HOMER

|
Bryan Talenfeld
|
HOMER (Helping Others Move Easily on Roads) will drive around on streets until he detects a traffic light and then will help colorblind people by saying the color. |
Final Report
|
PD

|
Carlo Pascoe
|
PD (Poker Dealing Robot) |
Final Report
Sensor Report
|
BOSS

|
Greg Garcia
|
BOSS is the perfect companion for all shoppers. You'll never have to worry about finding let alone lugging around that cumbersome shopping cart again. No matter where you go in the store he'll always be right there when you need him. |
Final Report
Demo Movie
CNN Movie
|
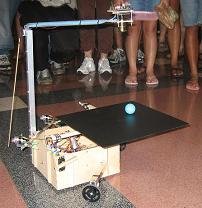
Atlas
|
Jeremy Greene
|
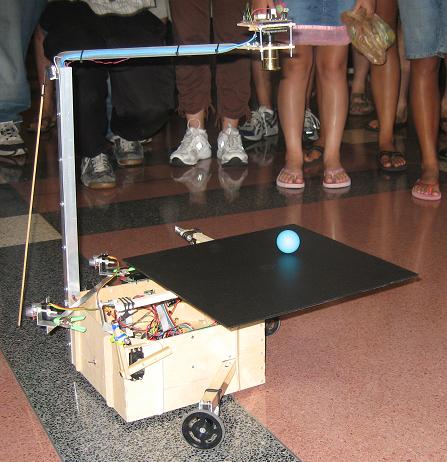
Atlas will roam around a room, avoiding obstacles, while balancing a ball. This will be done by monitoring the ball with a camera and tilting the platform when the ball is not centered. |
Final Report
CMU Cam Report
|
TeleRAD
|
John Curreri
|
TeleRAD (Radiation Absorbed Dose) is a radiation survey robot that will detect radiation levels by using a Geiger counter. |
Final Report
Sensor Report
|
The Extinguisher

|
John Miller III
|
The Extinguisher is a modified tank that will locate a fire and put it out by using an internal water pump system which exits via the tank’s barrel. |
Final Report
Sensor Report
|
Daedalus
|
Robert Preneau
|
Daedalus is a maze navigating robot. He will be placed in an arbitrary location inside of a maze and will begin systematically searching through the maze to find an RF (radio frequency) tag located on the ground. Once he identifies the RF tag, he will play a song to show that his job is completed. |
Final Report
|
ARBA

|
Rolando Desrets
|
ARBA (Autonomous Robotic Basketball Agent) will play a simple game of basketball by finding and loading balls, then finding a vertical hoop and shooting |
Final Report
|
MALV

|
Scott Bowman
|
MALV will navigate a heading specified by two GPS waypoints. Along that path the robot will avoid obstacles and know when it has reached the edge of something, like a roof top. The robot will have sonar sensor, a GPS sensor, and a magnetometer. |
Final Report
|
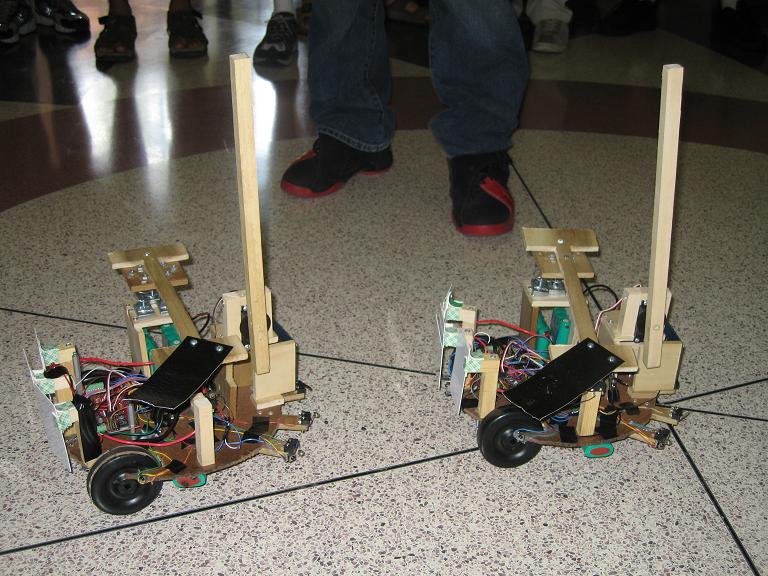
Ying & Yang
|
Stefan Creciun
|
Ying & Yang are two robots which will play a game of tag. The robots will avoid obstacles and will recognize each other with the use of IR detectors and emitters functioning at a particular frequency as well as RFID readers and tags. |
Final Report
Movie
|
Tracker

|
Steve Spalding
|
Tracker is a robot designed to track and follow a radio frequency beacon. Once discovered, he will hide in the nearest dark corner. |
Final Report
|
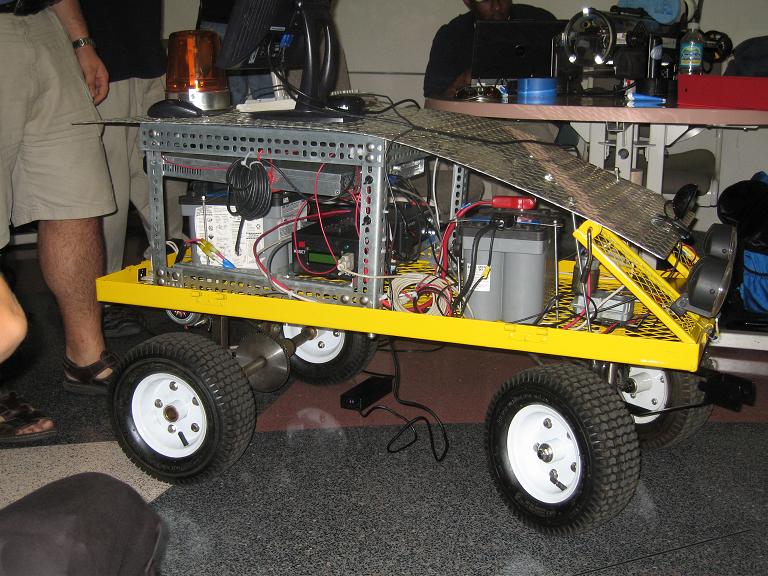
InstiGator

|
Steven Velat
|
The goal of the InstiGator is to provide a stable platform for the rapid development of various sensor components for Team Gator Nation in support of their efforts in the 2007 Urban Challenge. The initial goal is to aid in the development of a line/lane following sensor component known as the “Road Finder.” |
Final Report
|