- Sat, 17 July 2010 (night):
What do you want firts the good news or the bad news? ...
The bad news is that we did not make the finals. In fact, we did not get a competition run at all. We will therefore not be on the video feed tomorrow afternoon (see previous post).
The good news is that there is a second chance competition for the first time every. We are very excited to have a chance to show our excellent capabilities here at the competition. We even have high hopes of beating some of the teams that made the finals. We will have our last run of the competition at 11:15am on Sunday.
sWe were ranked third of the teams that did not make the finals. We scored a perfect 800 on the JAUS competition today. As of the last time we looked, only 4 other teams had earned a perfect score. We also believe that we are the only fully JAUS submarine.
- Sat, 17 July 2010 (morning):
Sorry for the lack of info, but the internet has been bad and we had no good info until now. Our motor drivers have been blowing up ever since we got to San Diego. The drivers worked for probably 100 hours in Gainesville with no problems, but not here. We tried about 20 different things, and finally found something that seems to work. We have rewired several parts of the sub now, replaced at least 25 MOSFETs. We are now recalibrating the compass (since the rewiring will effect the the compass).
We earned third place overall in the static phase of the competition (including paper, web site, presentation, etc.). We picked the very last preliminary run time of the day, at 5:30pm today. This will be our last chance to make the finals (since we took a pass during our first run because we only had 4 working motor drivers at the time). Cornell was first and ETS second in static judging. (We probably lost points on the website.)
I will try to post something tonight to tell the results. Go to http://www.todocast.tv/500films/auv2010/ to watch the robot submarine competition finals LIVE on Sunday (July 19th) from 1-5pm! Of course we are still HOPING to be in the finals. If nothing more happens with the motor drivers, we should be there.
Other videos and updates from the competition site might be available at www.robosub.org.
- Mon, 12 July 2010:
We are now at the Gainesville airport. Everyone got through security. Dana and Jheanell don't yet have seats or boarding passes for the last leg of our three leg trip out to San Diego.
In-pool testing went very well last week. We had no problem detecting and bumping the specified colored buoys, finding the "camp counselor" PVC structure (by finding the pinger), and lifting "him" to the surface. Two things still need to be tested in the water, the weapon identification and the finding the hedges. Both have been thoroughly debugged in the lab.
- Fri, 2 July 2010:
Great progress was made this week. We have been testing in the water, integrating the various systems. Waypoint control is good. We are cleaning up vision navigation and hydrophone navigation. We got rained out today (from pool work), but will back in the water tomorrow morning.
A final design grab/release device was completed today. (We probably had 7 previous designs that we junked.) Our goal was to have a very reliable grabber and a fairly reliable dropper. We believe our design exceeds theses specs. A picture can be seen below.
The shirts were picked up today. They look good!
- Mon, 28 June 2010:
Last week there were no classes at UF, so there was plenty of time to finalize and clean things up.
The trip logistics have now been finalized, i.e., all airline tickets purchased, hotel rooms reserved, minivans reserved, rides to airport arranged, etc. The team T-shirts and polo shirts have been designed and ordered.
We spent some time in finalizing the shooter (with some new rapid prototyping) and the grabber (with a new design presently under construction). The droppers are ready to go.
The new hydrophone board has been tested and works well. A problem with one of the coax cables to a hydrophone had a short. This was repaired and the others were all rebuilt, just to be safe. We also made a backup connector that is now being used on a waterproof box for testing the hydrophones seperately from the sub. We are still having some issues with the C# code for the hydrophones.
The vision sysem is coming along well. We can find the buoys consistently and set waypoints based on them. The shooter window is returning pose information, but we need to calibrate the cameras to improve this to within our desired specs.
The JAUS/Mission planner is just about finalized.
The website is okay, but will be updated with more pictures the next time we get to a pool. The required forms and paperwork were sent in over the last week, as required by the competition rules. The paper will be submitted tonight by midnight.
- Thur, 17 June 2010:
Found some corrosion in a Fischer connector that may have caused a motor driver failure. Subrat found some other issues as well, and fixed them.
- Wed, 16 June 2010:
Cool promo for the 2010 competition!
- Mon, 14 June 2010:
Added a buzzer inside the sub to give various audio indications about what is going on inside.
- Fri, 28 May 2010:
After a few hours of discussions, we decided to make one battery pod 16V and the other 32V.
- Tues, 25 May 2010:
PIC microcontroller board designed and verified for the new humidity sensors.
- Mon, 17 May 2010:
The motor driver cards worked perfectly, we tested for max possible current, and we got good current readings from the current sensors. Other things to do this week:
1) Re-do the thruster force mapping
2) Mold the power cables
3) Present the SubjuGator paper at FCRAR (Florida Conference on Recent Advances in Robotics)
4) Align the DVL and IMU
5) Re=do the magnetometer-current and hard-soft iron correction with thrusters fixed rigidly
6) Align the magnetometer and IMU
7) Next week will start test of all the pose estimation code and start verifying the new hydrophone system with high speed USB
- Sun, 9 May 2010:
The new motor driver cards have been populated, tested, and worked fine on the sub on land. We will confirm that everything works under load in the next few days.
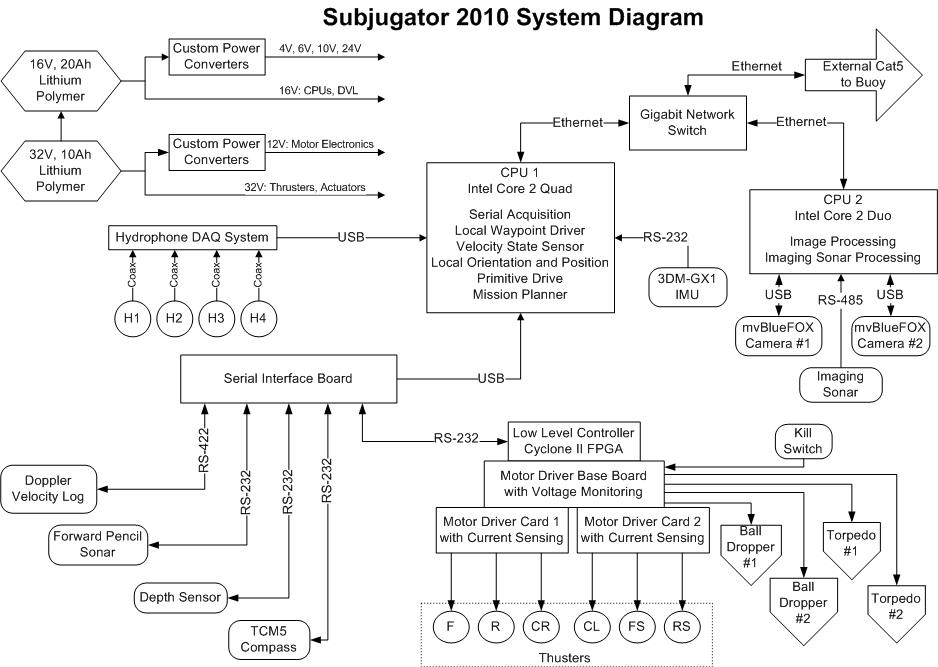
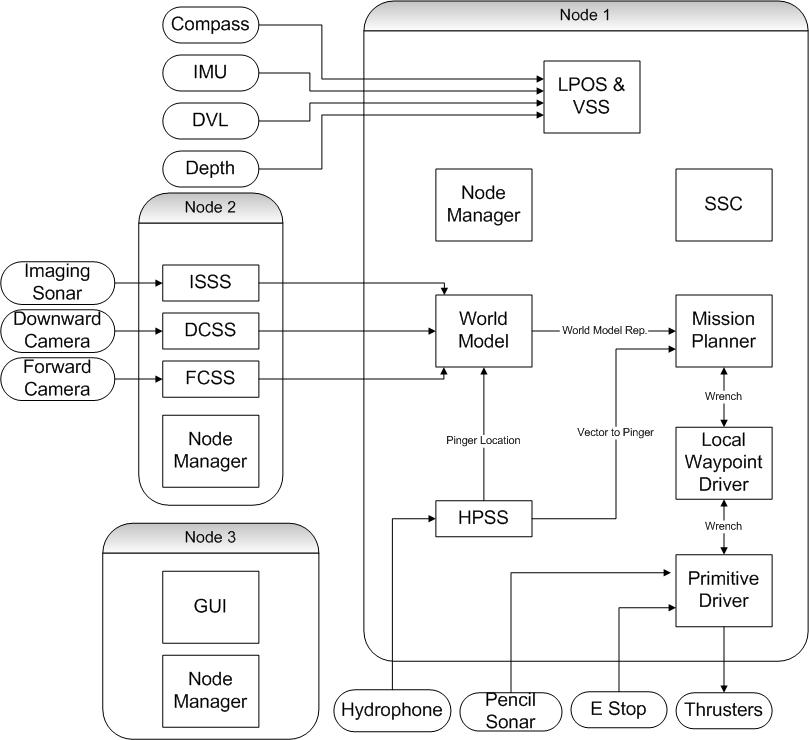
- April 2010:
We created these various diagrams over the last month.
- Mon, 22 March 2010:
3-D simulator competition demostrations. 2 groups both showed promise. We asked them to work together to come up with a single system.
- Fri, 16 March 2010:
Issued a State of the Sub document. We demonstrated the thruster mapping algorithm worked, even in the presence of saturation. We have decided that we need to redesign our motor drivers.
- Sat-Sun, 6-14 Mar 2010:
We thoroughly cleaned the sub, using tooth brushes and alcohol. We also rewired and resoldered all the Fischer connectors.
- Tues, 9 Mar 2010:
Most of the team and some others traveled to the NSWC (Naval Surface Warfare Center) base in Panama City, Florida, for a tour and discussions of some of their work and how we can work together.
- Thur, 4 Mar 2010:
Made a detialed list of all the mechanical and electrical items to be rebuilt or designed and fabricated. Also made a list of items to be tested, serviced, and/or cleaned. Plan to do most of this over our spring break next week.
- Thur, 11 Feb 2010:
Kick-off meeting for 3-D simulator competition. 15 students attended.
- Tues, 8 Feb 2010:
Announce a 3-D simulator competition with cash prizes.

Competition announcement flyer.
|
- Sat, 6 Feb 2010:
Made a list of things to do:
1) New depth sensor board.
2) Wiring needs to be labeled. Use labels printed in small font using the label maker and make it flag around the wire. If it's a group of wires inside a sheath, they can have a given a single label but it would be better to also mention the color of each wire and what it means on the single label. Document all the wiring including what kind of connectors and groups of wires going to these connectors. Document which pin of the Fischer connectors means what on a picture of the Fischer connectors being seen from outside. Replace any bad wires, poor crimp jobs, damaged connector housing and any connectors which are not locking type. Replace the single conductor wires by new paired wires (i.e., two wire inside a sheath) or twist them and wrap them with tape or heat shrink throughout their length. Make sure all wires back there have connectors and not directly connected from the back plane to Fischer connectors.
3) Add extra micro controller board or just connect the RS232 lines (Rx, Tx, Vcc, Gnd) from backplane to a free Fischer connector so that later on the display box can be just hooked to this Fischer from outside without opening the back plane.
4) Make the rear backplane upside down to get the rear tray upside down.
5) Make sure the IMU/compass is rigidly mounted.
6) Make changes to the position of the crimps connected to the mini-fit connectors on the back plane to suit the new rear tray.
7) Leakage detection - we know that there is very less chance of leakage thru the end caps so it has to be through the Fischer (which are on the front and rear side and not lateral sides) or the DVL joints down behind the back plane. We need to identify where to put the electrodes to sense a leak. We have to make sure that they are lower than anything else, which means we need to move the depth sensor and Ethernet switch boards slightly up if the electrodes cannot go below everything else.
8) The solder joints on many of the Fischer connectors need to be redone. Many are bad. After resoldering, coated them with heat shrink and then plastic dip them to give them some protection from water.
- Tues, 15 Dec 2009:
In the water for the first time since the competition for some data collection! (In Florida, we can get in a pool in December.)

At an apartment pool.
|
- Monday, 3 August 2009:
Unfortunately, we did not do well in the 2009 competition. But be assured, in 2010 we WILL be in the game! Congratulations to Cornell, the 2009 champion. See
www.auvsi.org/competitions/water.cfm for some video of the event. Below are the rest of the pictures from the event.

Lowering sub.
|

Patrick & sub (Harris).
|

Checking batteries.
|

On crane (LM, Fischer, GatorEng).
|
- 2009 Blog
- 2008 Blog
- 2007 Blog
|