|
Robot
|
Creator
|
Description
|
Final Paper
|
Belle

|
Jeremy Anderson
|
Belle is an autonomous shape-changing robot that responds to light changes and approaching people. She can also drive around and avoid obstacles in either mode of operation. |
Final Belle Report (MS Word)
|
Tubby

|
Samit Gokhale
|
Tubby is an autonomous floor cleaning robot. It uses two brushes below the robot to sweep the floor as it moves around. Tubby initially follows a wall, cleaning close to the wall, then it performs random movements and avoids obstacles, thus cleaning the entire surface area.
|
Final Tubby Report (MS Word)
|
Pinky

|
Xuan Gu
|
Pinky is a "Micro Mouse" robot that travels through a maze, maps its course, and finds the shortest possible path to the destination. Autonomous behaviors such as wall collision avoidance, wall gap detection, high precision steering control, and a maze solving algorithm were implemented to achieve the objectives of a "Micro Mouse" robot.
|
Final Report on Pinky (MS Word)
|
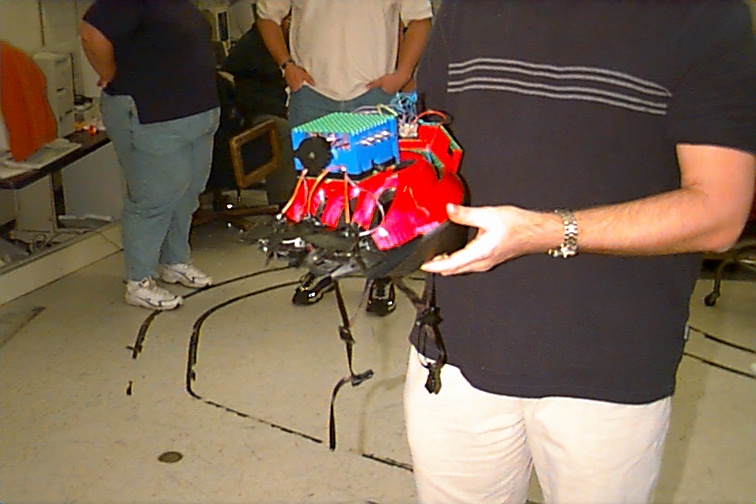
Mr. Firefly

|
SteveLapha
|
Mr. Firefly is a versitile entertainment robot that interacts with people.
|
Mr. Firefly Final Paper (MS Word)
|
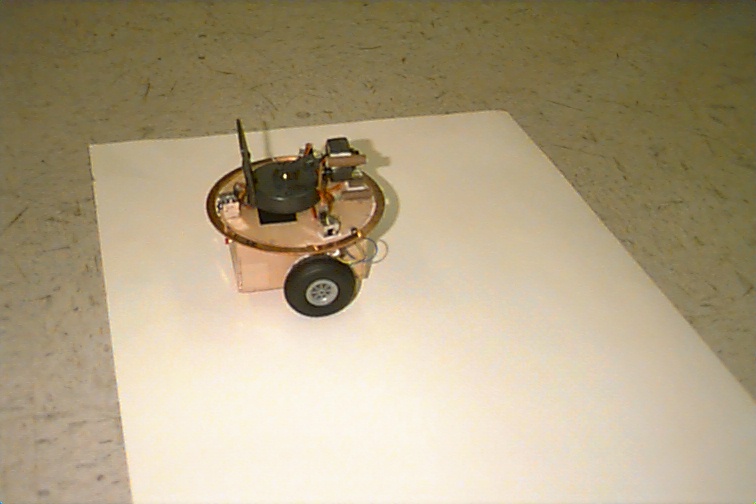
Spy

|
Yu-Ju Lin
|
Use the SPY robot to find lost rings or valuables under tables, beds, or other tight places that are not reachable. You can assign a coordinate, and the robot will go there transmitting video home, and then return. Spy uses 1 RF video camera, 1 photoresistor, 2 shaft encoders, 4 IR detectors, and 4 bump switches.
|
Final_ReportLin.doc
|
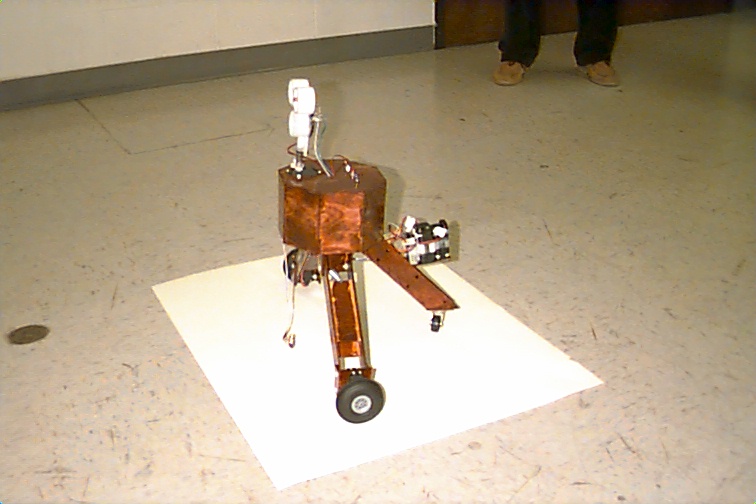
Atocha Too

|
Donald MacArthur
|
An autonomous robot used to find metallic objects on the beach. The robot uses a Motorola microprocessor, servos, and other common robotics parts. It incorporates an ultrasonic ranging module, infrared emiters, and receivers for obstacle avoidance. |
Final Report (pdf)
|
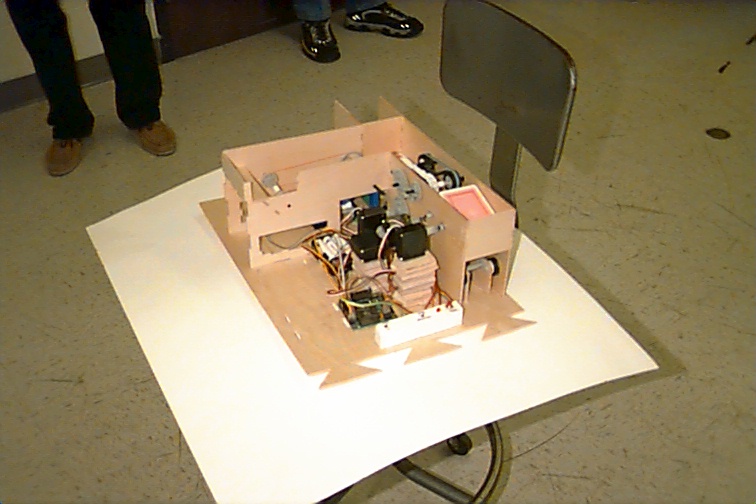
Pin-occhio

|
Jeremy Mayer
|
An intelligent machine that will display 3D objects and digitize 3D objects for display as a computer image. The apparatus consists of many axially alligned steel pins. When the pins are displaced together, they form 3D surfaces.
|
Pinocchio Final Report (MS Word)
|
Eyebotic

|
Dale Milcetich
Click here to see Dale getting make-up for TV...
|
Eyebotic is a headpiece designed to guide blind and/or deaf people safely around and office building. The headpeice uses IR, pitch, and roll sensors along with vibration feedback to judge accordingly the distance the user is away from an object.
|
Eyebotic Final Paper (MS Word)
|
Leroy

|
Jennifer Richards
|
Leroy is a robot that will play the card game "Go Fish" with human players.
|
Leroy Final Paper (MS Word)
|
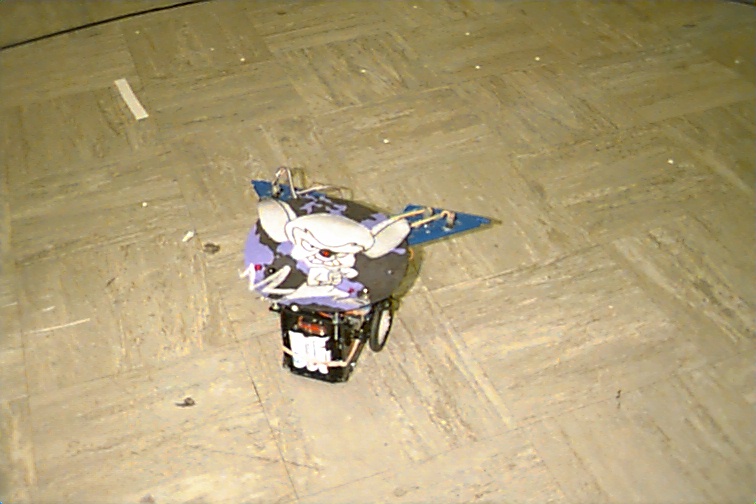
Brain

|
Edison Rodriguez
|
Brain is a "Micro Mouse" robot that travels through a maze, maps its course, and finds the shortest possible path to the destination. Autonomous behaviors such as wall collision avoidance, wall gap detection, high precision steering control, and a maze solving algorithm were implemented to achieve the objectives of a "Micro Mouse" robot.
|
Brain Final Paper (MS Word)
|
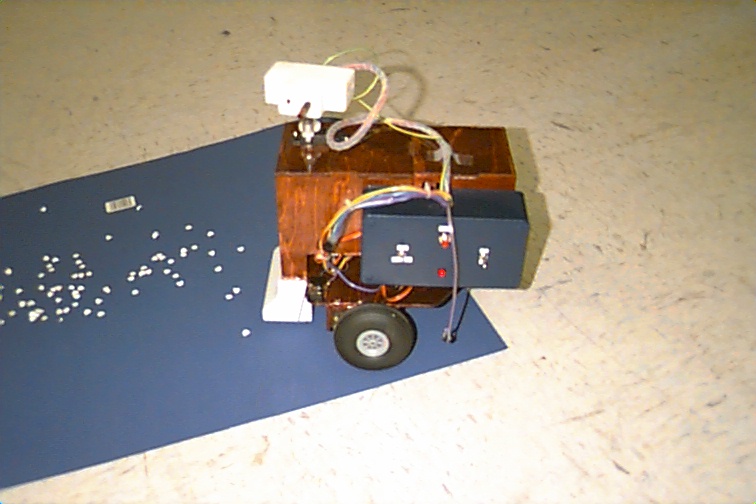
Stoker

|
Mikael R Sigfridsson
|
A robot that picks up empty cans.
|
Final Paper (MS Word)
|
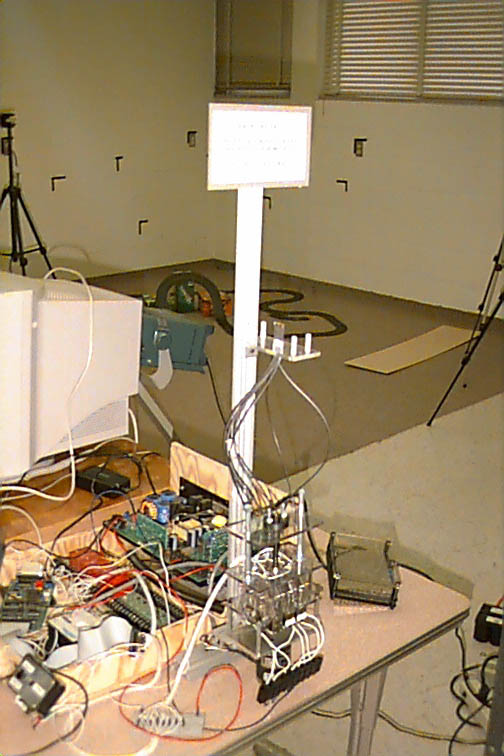
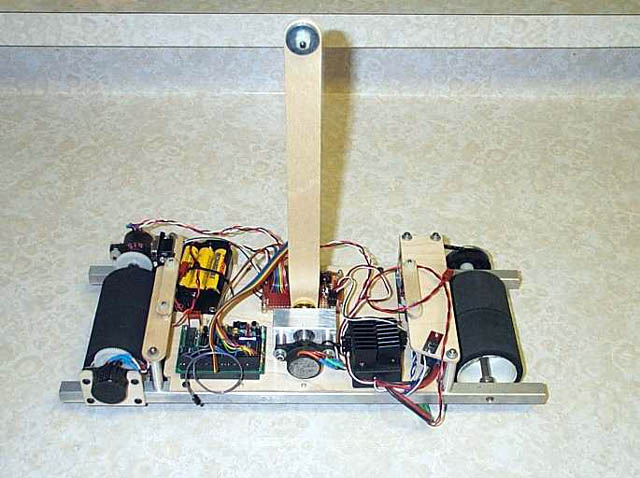
EPCUS: An Experimental Platform for the Control of Unstable Systems

|
Randy Wells
|
A platform that balances an inverted pendulum by moving the base along a line.
|
EPCUS Final Paper (pdf)
|
Mr. Mom

|
Erica Zawodny
|
This robot vacuums a given area. It was custom designed and can perform obstacle avoidance while vacuuming. A Dust Buster (c) motor assembly was integrated into the mobile platform. Additionally, the robot has remote activation with IR and will search, find, and follow an IR beacon.
|
Mr. Mom Final Paper (pdf)
|

{kind=link}