| Robot | Creator | Description | Final Paper |
Gargo

|
Ahmet Erdem Altunbas | Gargo is an autonomous robot which is called also called Gator Cargo. Gargo will measure the dimensions and weight of package and, along with the destination address, it will calculate and display the cost of the shipment. | Final Report Movie |
Walligator
|
Donald Burnette | Walligator will follow walls along a track until it sees a sign colored either red or green at a split in the path. It will make a decision to turn left or right, depending on which color it sees. Left will be red and right will be green. |
Final Report
|
Eagle Caddy

|
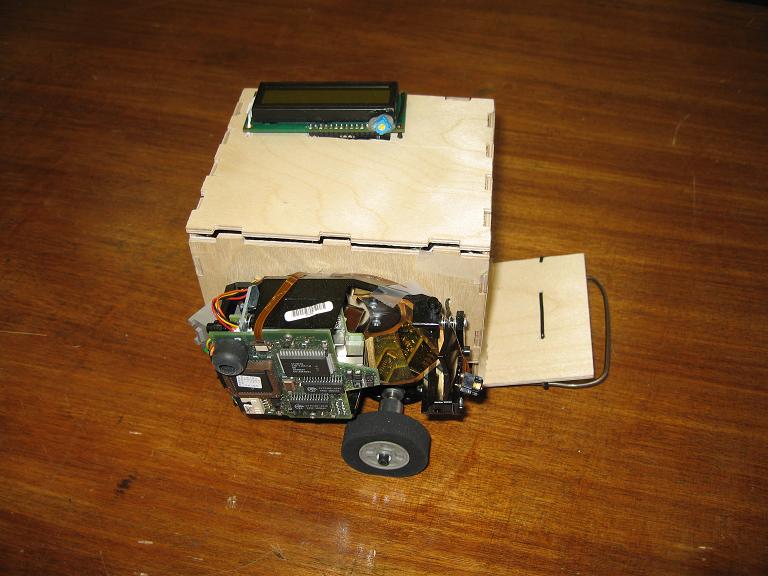
Christian J. deVivero | The Eagle Caddy robotic pull cart will benefit golfers of any skill level. It is designed to follow a golfer. Eagle Caddy will follow without interrupting the golfer’s normal walking pace, and avoid obstacles while doing so. Eagle Caddy can detect whether it is on fairway grass or in the rough, and will steer clear of sand traps and water hazards. |
Final Report
|
Stockermajigger
|
Steven Cunningham | Stockermajigger is a warehouse wandering robot, that delivers mechandise from a store stock room to a loading bay or merchandise pickup area. The goal of Stockermajigger is to maximize productivity while eliminating injuries and shrink in the store. The stock room would be designed in a way to enhance product movement for teams of robots, thus increasing delivery time and raising accuracy of inventory count calculations. |
Final Report
|
goUPer
|
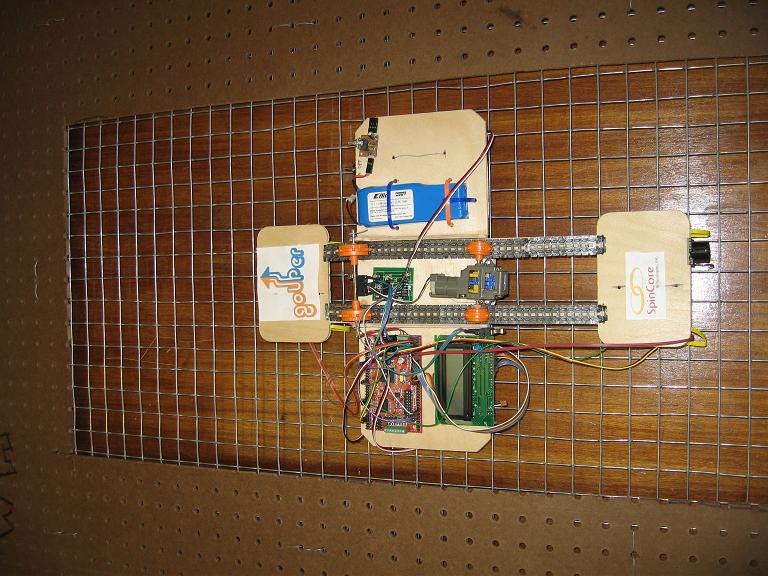
Peter Flores | goUPer is a robot who will climb walls, or hills! Using hook-like feet, goUPer will climb chain link fences. It will be able to display its height on the wall at any time and stop when something is on the way. At the heart of goUPer is a Maveric-II board with an Atmega128 micrcontroller. goUPer is sponsored by SpinCore Technologies of Gainesville, FL. |
Final Report
|
Tom

|
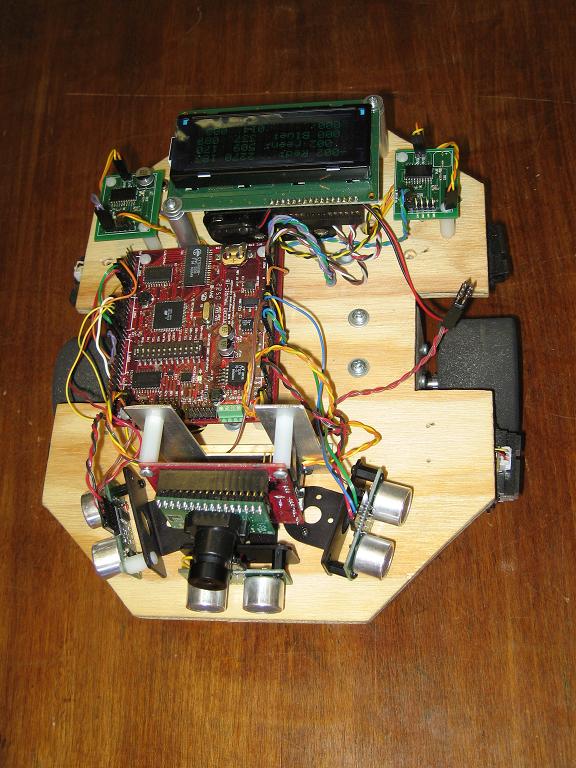
Joshua Hartman | Tom rapidly roams the room in search of his prey Jerry, smoothly turning to avoid obstacles. Tom possesses a rotating servo motor scanning for Jerry's infrared signature. When he detects the infrared, he will attempt to move in that direction. Tom and Jerry communicate game status using an RF link from www.sparkfun.com. |
Final Report
|
P.A.N.T.S.

|
Devin Hughes | Pants is a converted Robosapien V2 toy. The robot can walk, wave, and depending on his mood, listen to basic commands. He will exhibit basic obstacle avoidance, and do his best to annoy you. He might even play a game….if you ask nicely. |
Final Report
|
Jerry
|
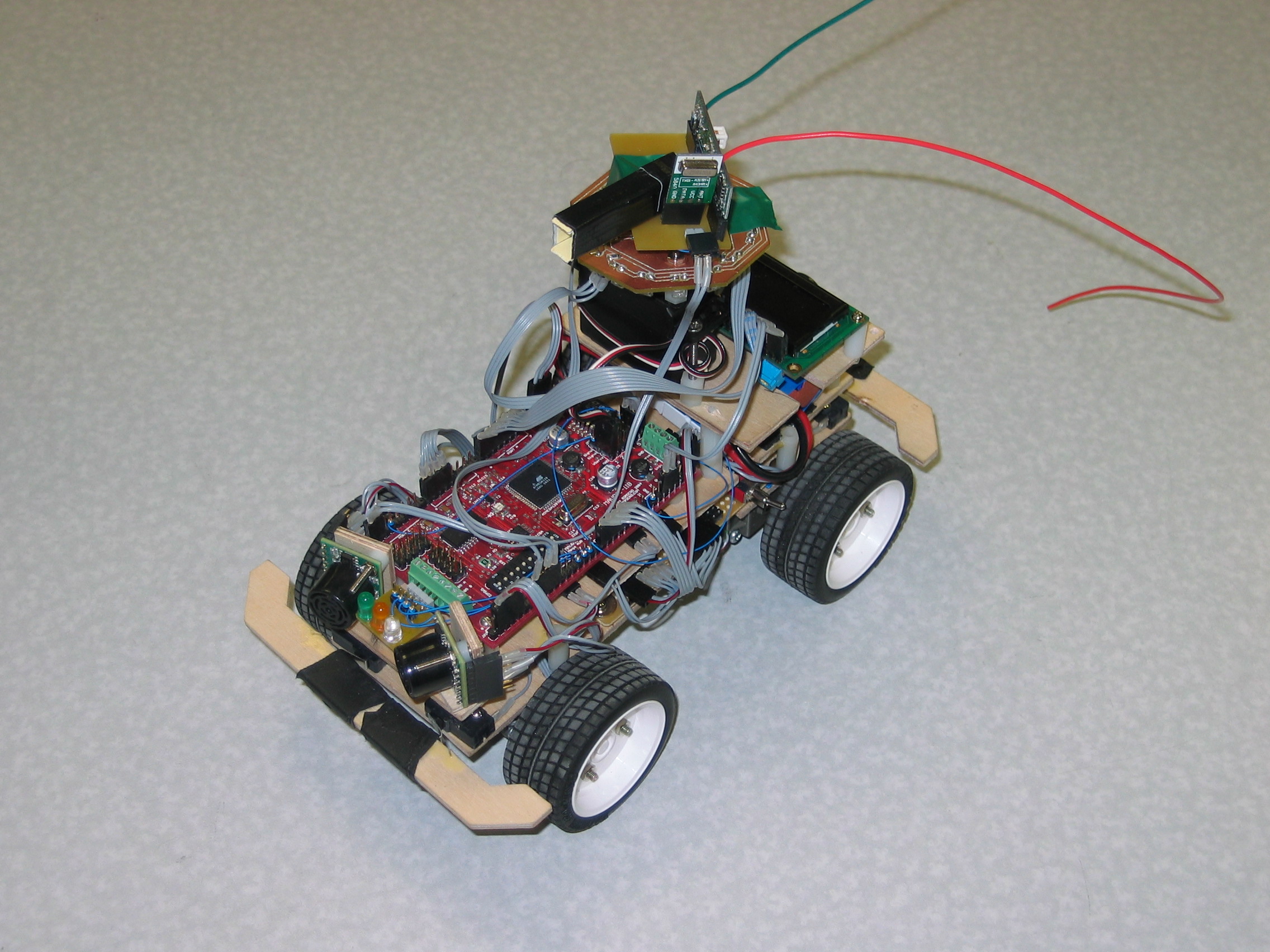
Nicholas Johnson | Jerry is a prey robot that works together with a predator robot Tom to simulate a Predator-Prey System. Jerry exhibits general prey behavior such as wandering and grazing. When Tom is introduced into the environment and Jerry “sees” Tom he will try to escape from Tom. |
Final Report
|
ROBO-CANECA

|
Luis Vega | Robo-Caneca is a robot garbage can that every home will want to own. The robot will solve the problem of who will take the trash out. Robo-Canica will bring the trash to the front door so the home owner can simply take the garbage out when it is ready. The owner is alliviated of the need to determine when the garbage is full and ready for disposal. |
Final Report
|
SwampBoard.Com Bot
|
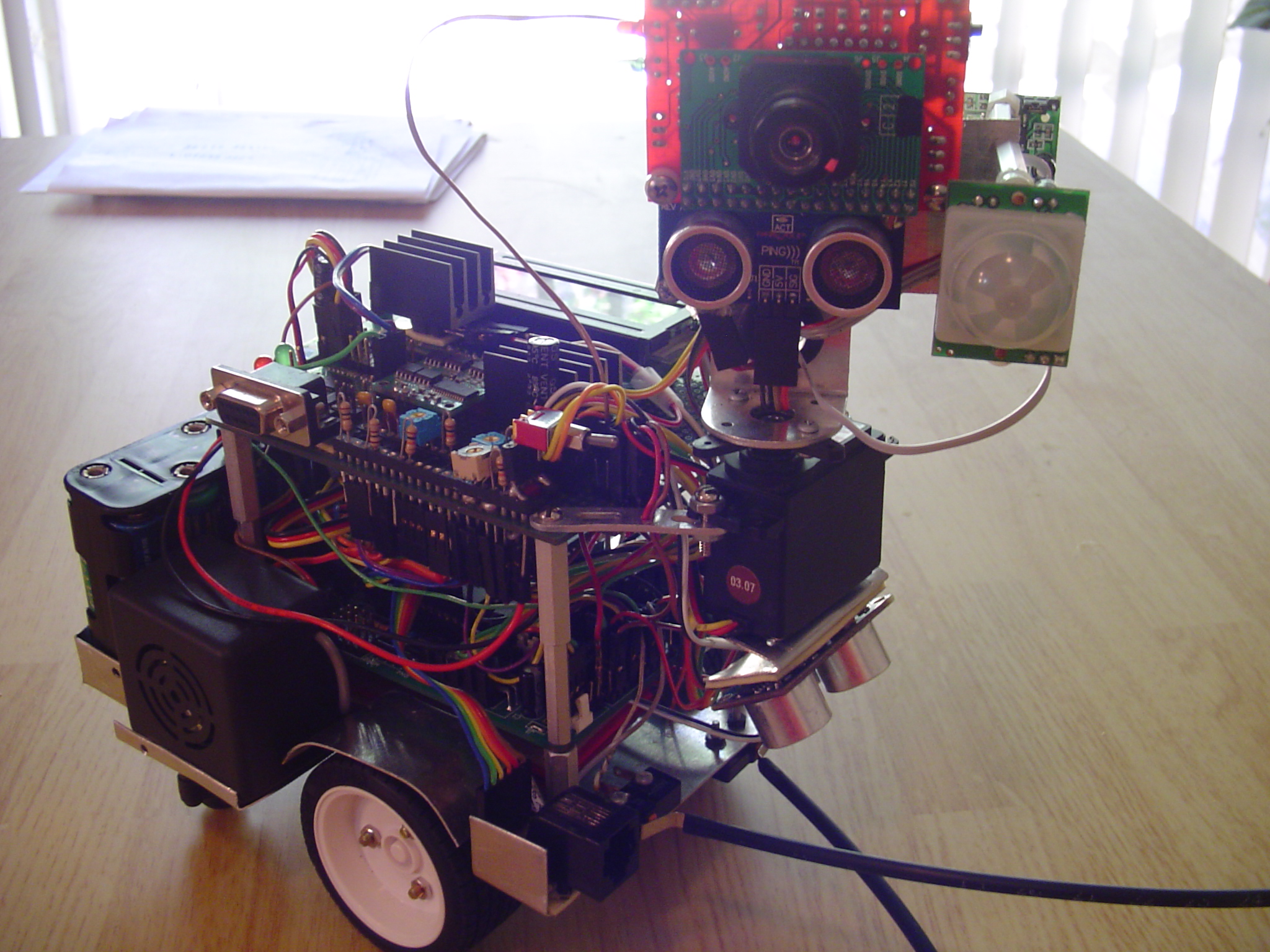
Pedro Machinero | R2-D3 like the its previous version in George Lucas’ “Star Wars”, is an autonomous human-following command-enabled robot. Unlike its antiquated cousin, it has the added advantage of a human-like voice instead of whirs and whistles. Like an obedient pet, it responds to visual signal commands, follows a human at approximately walking speed, detects other humans in the vicinity, and performs random obstacle avoidance; all the while responding to your commands in an understandable voice. |
Final Report
|
Smart Lens Robot
|
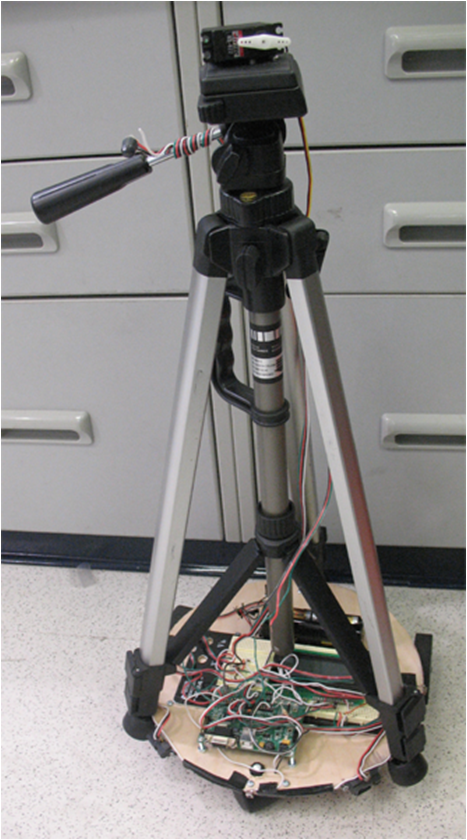
William MCCombie | A device intended to automatically control a camera and take pictures based on cues in the environment |
Final Report
|
Family - ROBI (ro-bi),
Parent - Robi (ro-bee),
Children - Remi and Multi

|
Thomas McDonley | ROBI (Ro-Beye) is a term used to describe a co-operative autonmous family of robots. These robots include Robi (Ro-bee), the parent, and Remi and Multi, the two children. The robots are modeled after real bological behaviors that are close in nature to a family of ducks. The robots must communicate to each other, see and be aware of each other, and their environment while interactting intelligently through these channels in meaningful ways to acheive a lifelike interaction between parent-child, child-parent, animal-environment, and prey-predator(me). |
Final Report
Special Sensor |
Beta Master (a.k.a Jessie)
|
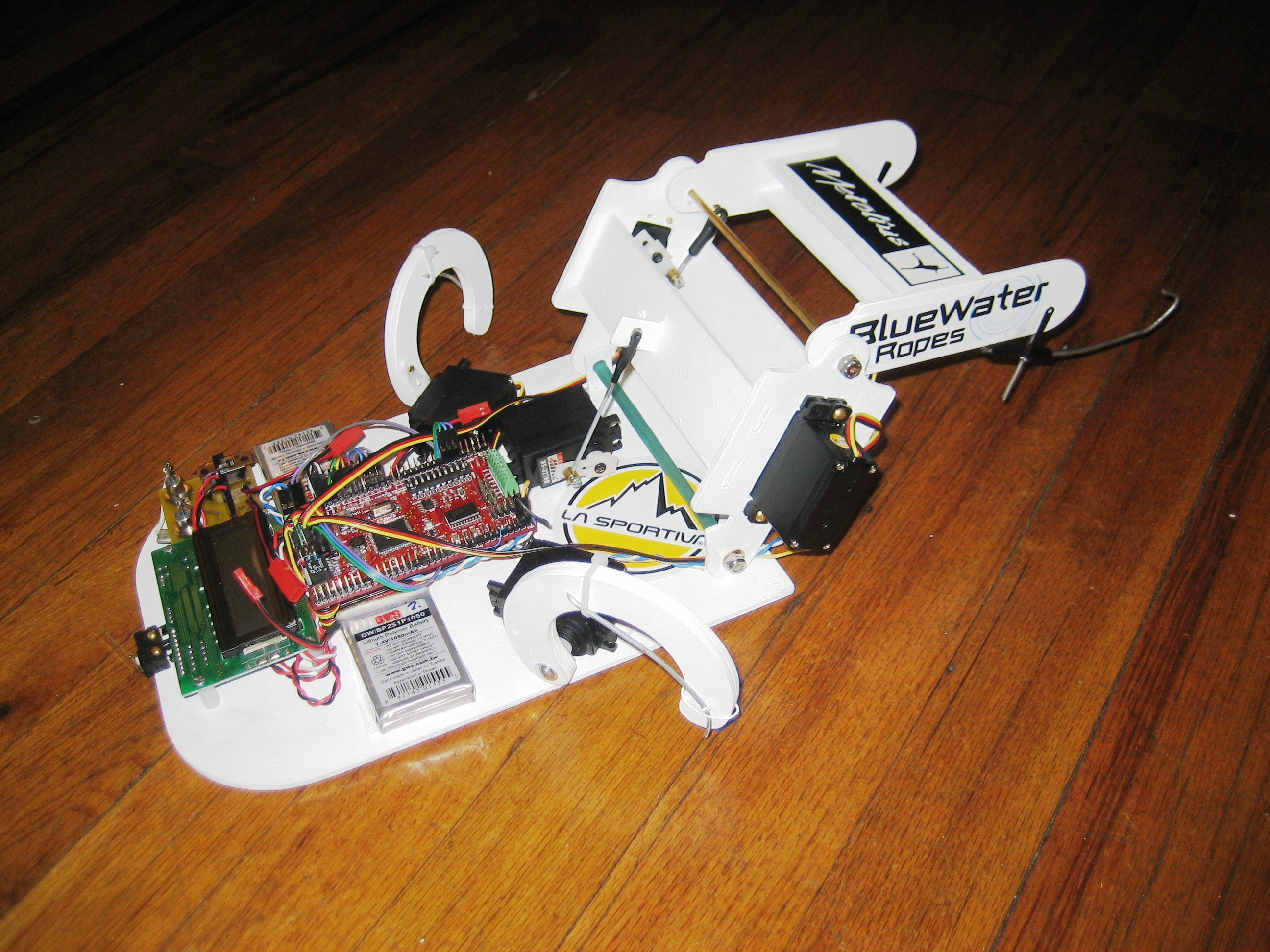
Michelle Berecz | Climbing is a sport that has stolen my heart. I generally stick to the safety of boulders and rock, although I’ve wondered what it would be like to dig into ice. Luckily, I am proposing a robot to make the ascent before me. As ice will be difficult to test/work with, the bot will climb a slab of foam using the same principles of ice climbing with his hands and feet as his “ice” picks. The slab will sit around 20-30 degrees from vertical (to give the robot a bit of traction) and be roughly 3 feet high. The general motion will be much like a “pull-up”.The arms will pierce the foam, pull-up, then a separate set of stabilizing legs will hold Beta Master's position while the arms reset for another pull-up. |
Final Report
|
Obliterator
|
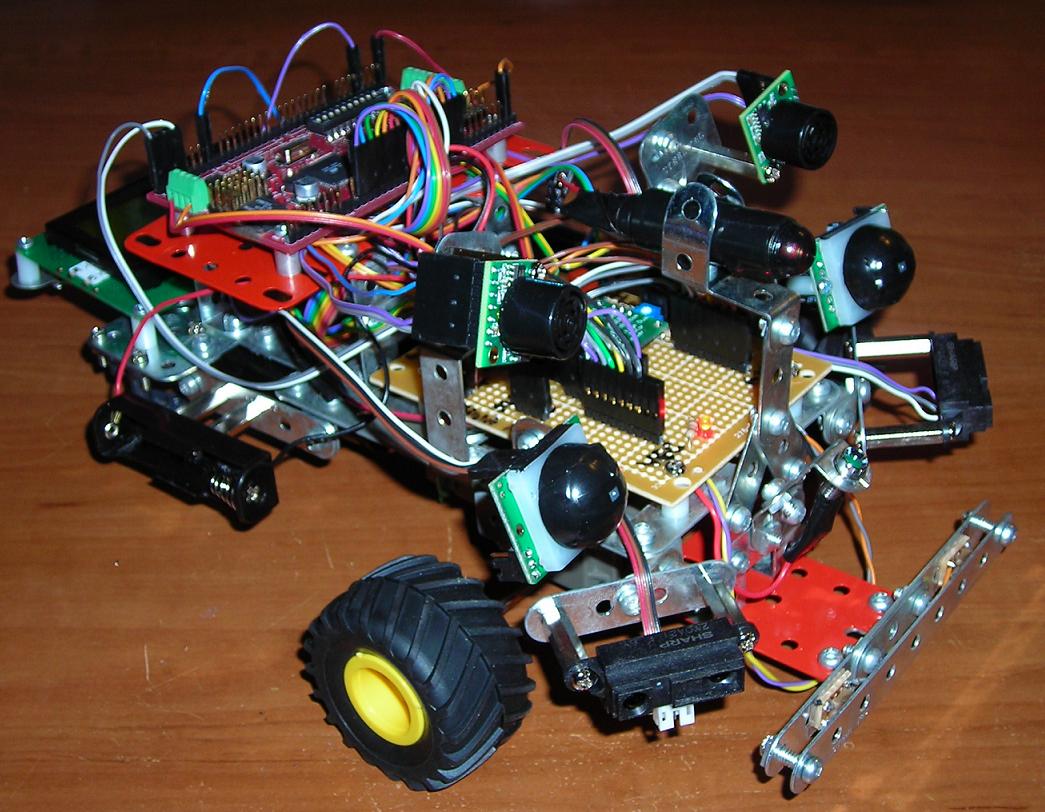
Jose Noriega | The Obliterator is the latest technology in sentry bots available on the market. The Obliterator combines obstacle avoidance with deadly accuracy in an auto-configuring package. Deploying the Obliterator simply requires the user to power on the unit while there are no obstacles directly ahead and making sure to leave the area before the 10 second calibration period is over. Once the configuration process is complete, the Obliterator will be calibrated to the conditions of its environment and all human presence detected near the Obliterator will be dispatched. |
Final Report
Special Sensor |
Pongator
|
Shu Jiang | Pongator is a robot that retrieves ping-pong balls for ping-pong players and puts them in a designated area. |
Final Report
|
Bluetooth Enabled Autonomous Mobile Robot (BEAMR)

|
Siddharth Gaddam | The BEAMR (Bluetooth Enabled Autonomous Mobile Robot), a sophisticated robot that takes pictures using it’s on board camera and transmits the visual data using the Bluetooth network to a cell phone. |
Final Report
|
Spherius

|
Chuck Smyth | Spherius is an amphibious obstacle avoidance robot. |
Final Report
|
Autonomous Construction Vehicle (ACV)

|
Jason Taylor | The Autonomous Construction Vehicle (ACV) is a robot designed to build structures out of .15 scale cinder blocks. The ACV also has a special intruder mode where when an intruder is detected it tosses the cinder blocks at the discovered target. |
Final Report
|
Dueling Dragsters (see also below)

|
Mike Pridgen | The two dragsters will race each other down a straight track, aiming for the best reaction time and the best elapsed time. The winner is the dragster which has the smallest total of the two. |
Final Report
Movie |
Dueling Dragsters (see also above)
|
Thomas Vermeer | The two dragsters will race each other down a straight track, aiming for the best reaction time and the best elapsed time. The winner is the dragster which has the smallest total of the two. |
Final Report
Movie |