IMDL Spring 2011 Final Reports
|
Robot |
Creator |
Description |
Final Paper |
|
RoboSat
|
Karl Brandt |
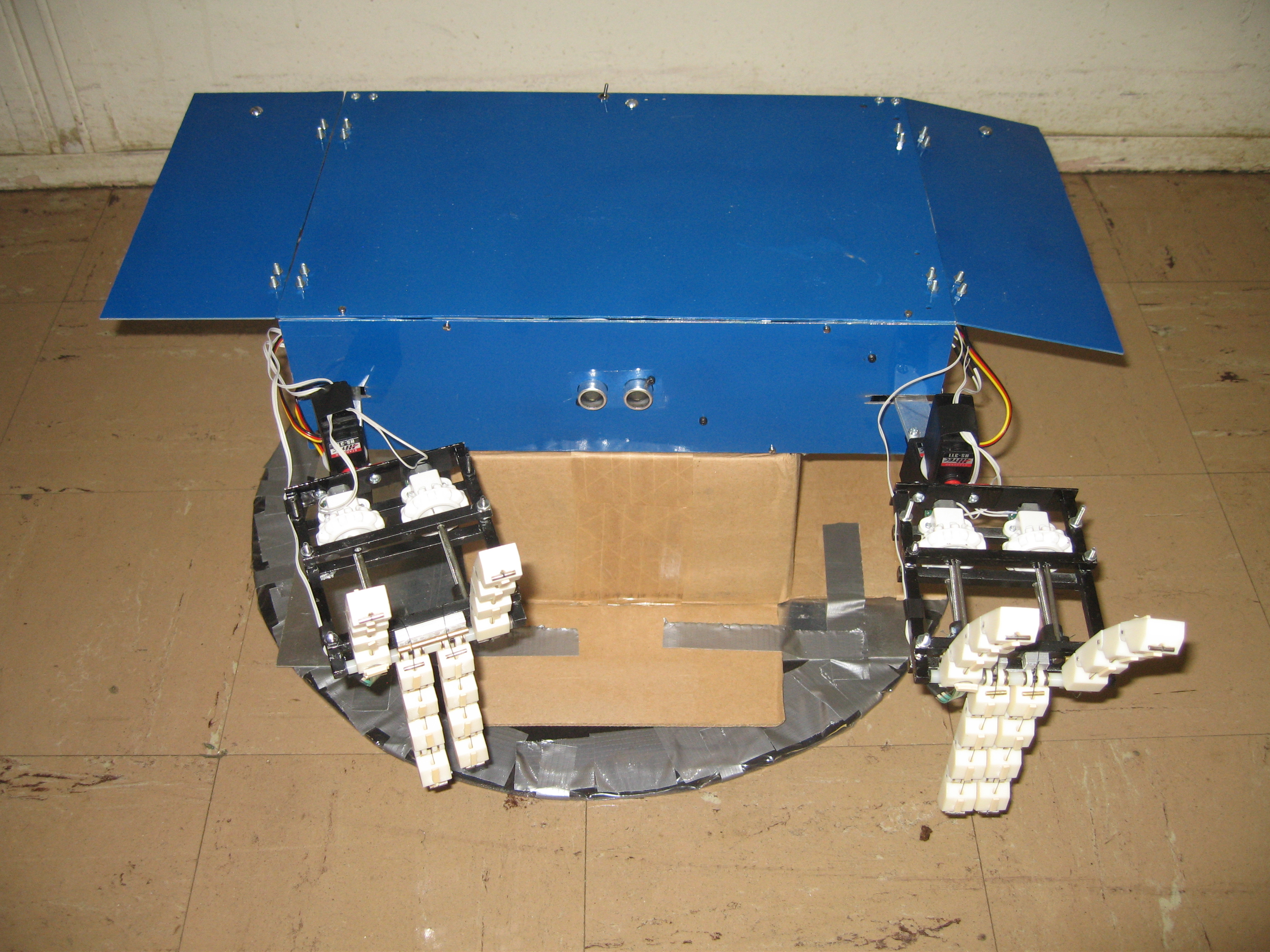
RoboSat is a 6U Cubesat robotic satellite. The
purpose of this first generation prototype is to prove that a small satellite is
capable of docking to and "climbing" on structures in space using dexterous
zygodactyle manipulators. While levitating on the ground via a small hovercraft,
RoboSat will use its two arms and manipulators to "climb" on various ground-
fixed structures. |
|
|
Parker-B
|
Steven_Edouard |
Parker-B is a parallel parking robot that knows if a spot is a legal space. |
Final Report
|
|
Dock-Bot
|
Ke Huo |
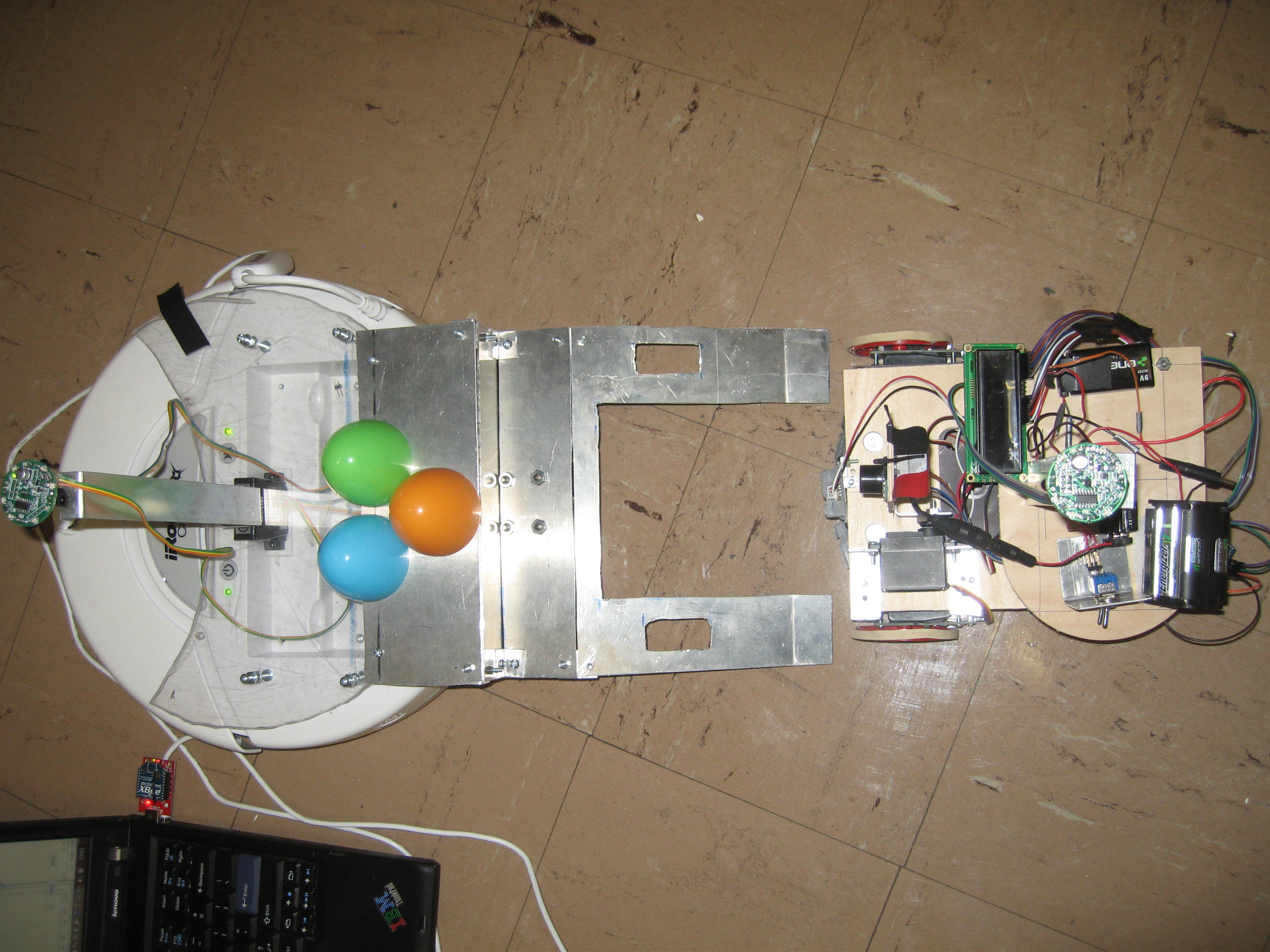
Dock-Bot has the capability to
locate and navigate to a base robot. Once the two robots have completed
docking, they will act together as one whole robot. |
|
|
Robot:Julius
|
Joseph Osentowski |
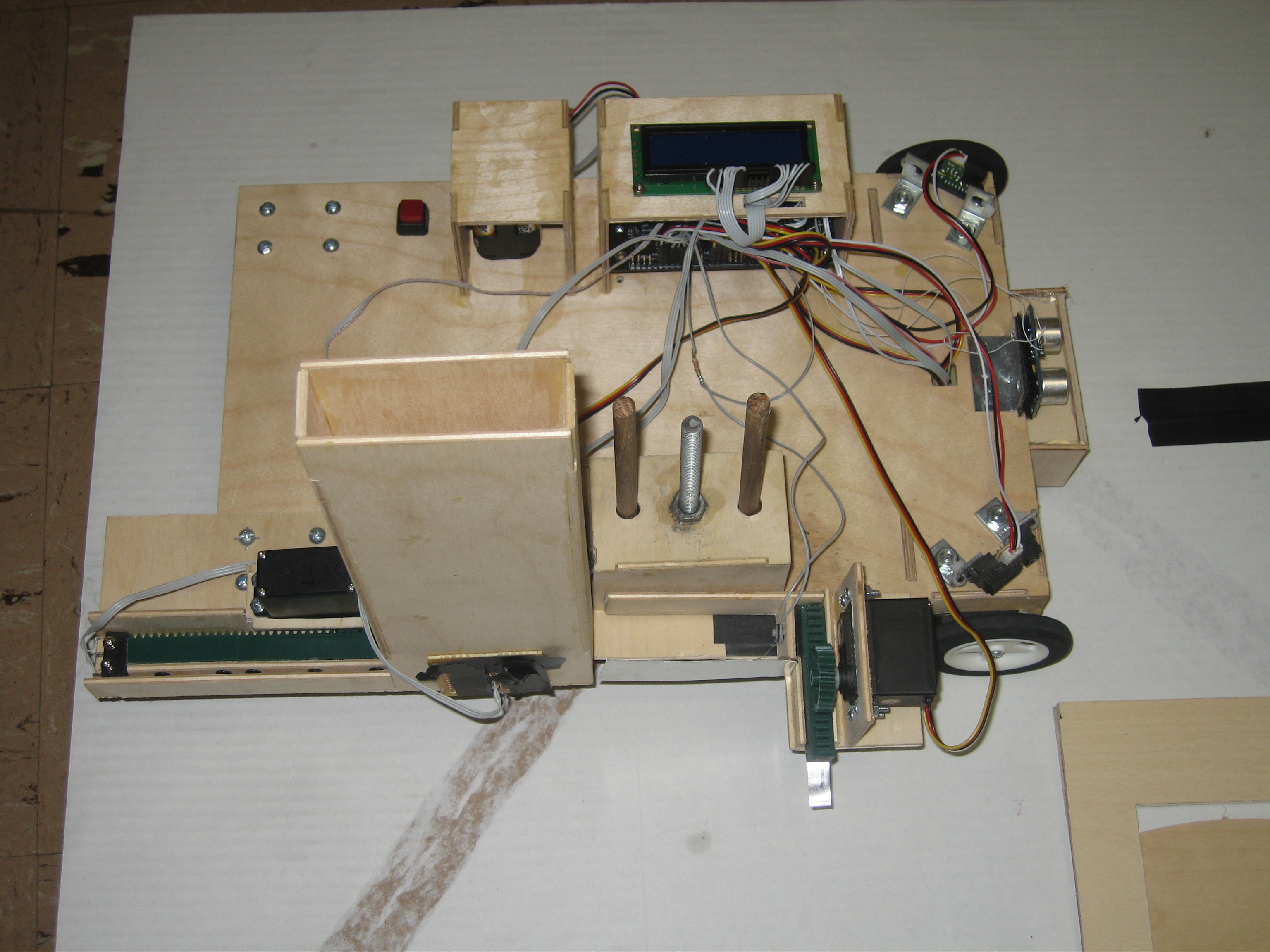
Robot:Julius collects oranges
after they have fallen to the ground. Once a sufficient number of oranges have
been collected, Robot:Julius deposit them at a predetermined location for
disposal. |
|
|
HexKitt
|
Josh Du |
HexxKitt is a six legged robot. This hexapod can either walk with its legs (like a cockroach) or move with his built in wheels. |
|
|
Wallmaster
|
Terence Tai |
Wallmaster builds a multi-level
wall using blocks. |
|
|
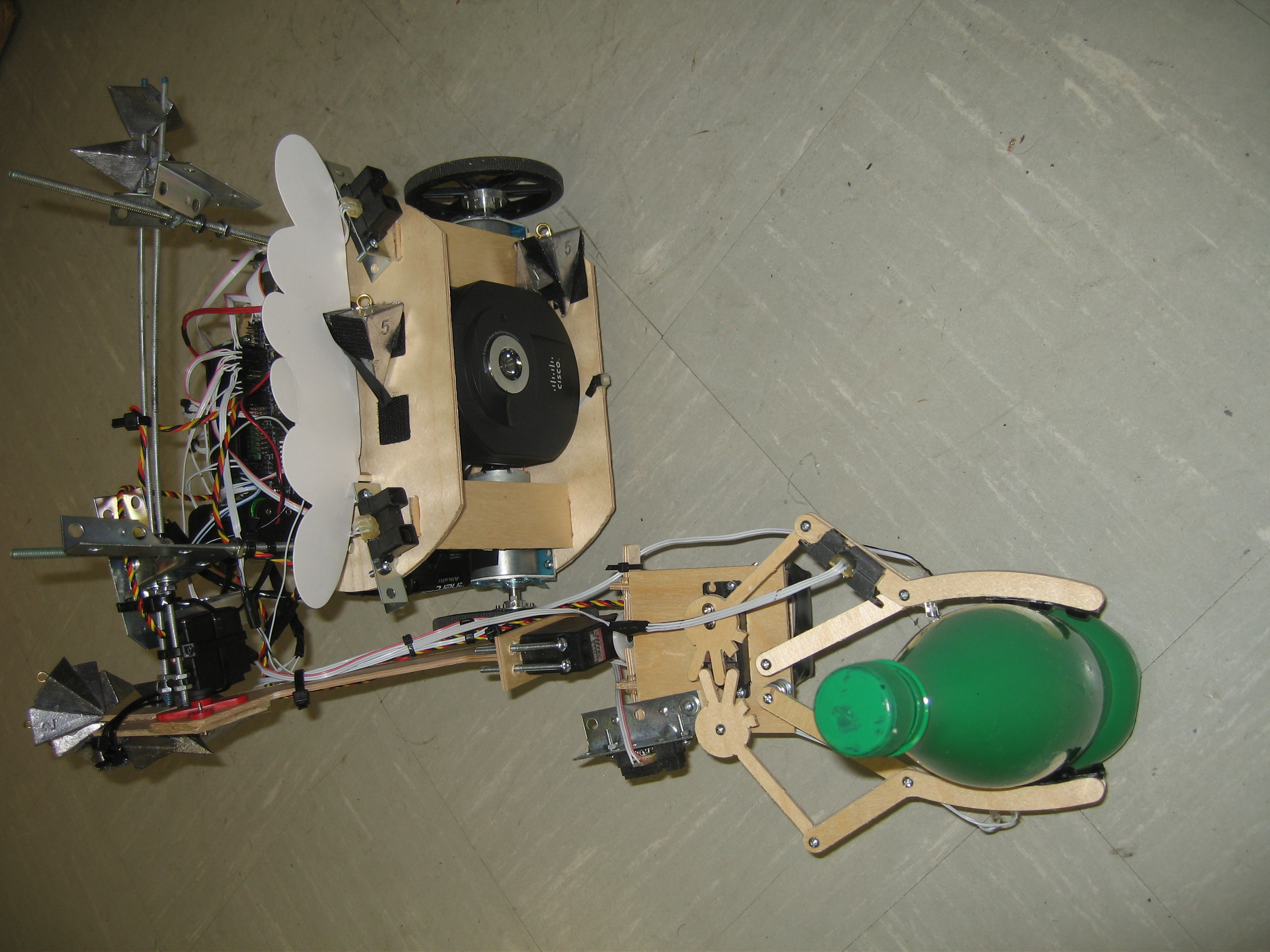
Iron HouseMaiden
|
Matt Morgan |
The Iron HouseMaiden retrieves green bottles, empties them of their remaining contents, and disposes of them in a specified container. |
|
|
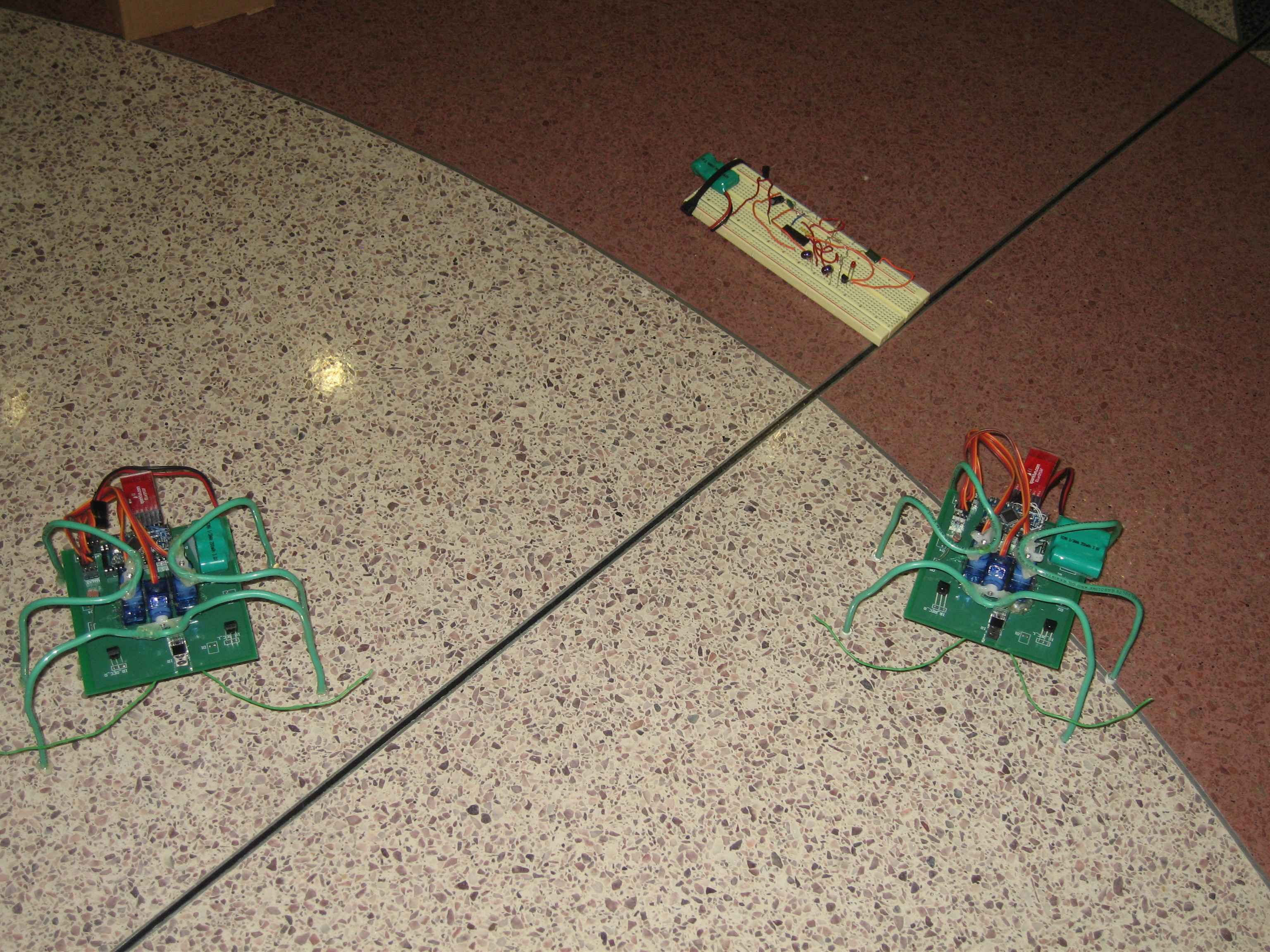
The Hive
|
Aldo Plaku |
The Hive is a swarm of hexapod robots that will "foraging for food." Once the target is found by a single agent, all the other agents will converge on the location. |
|
|
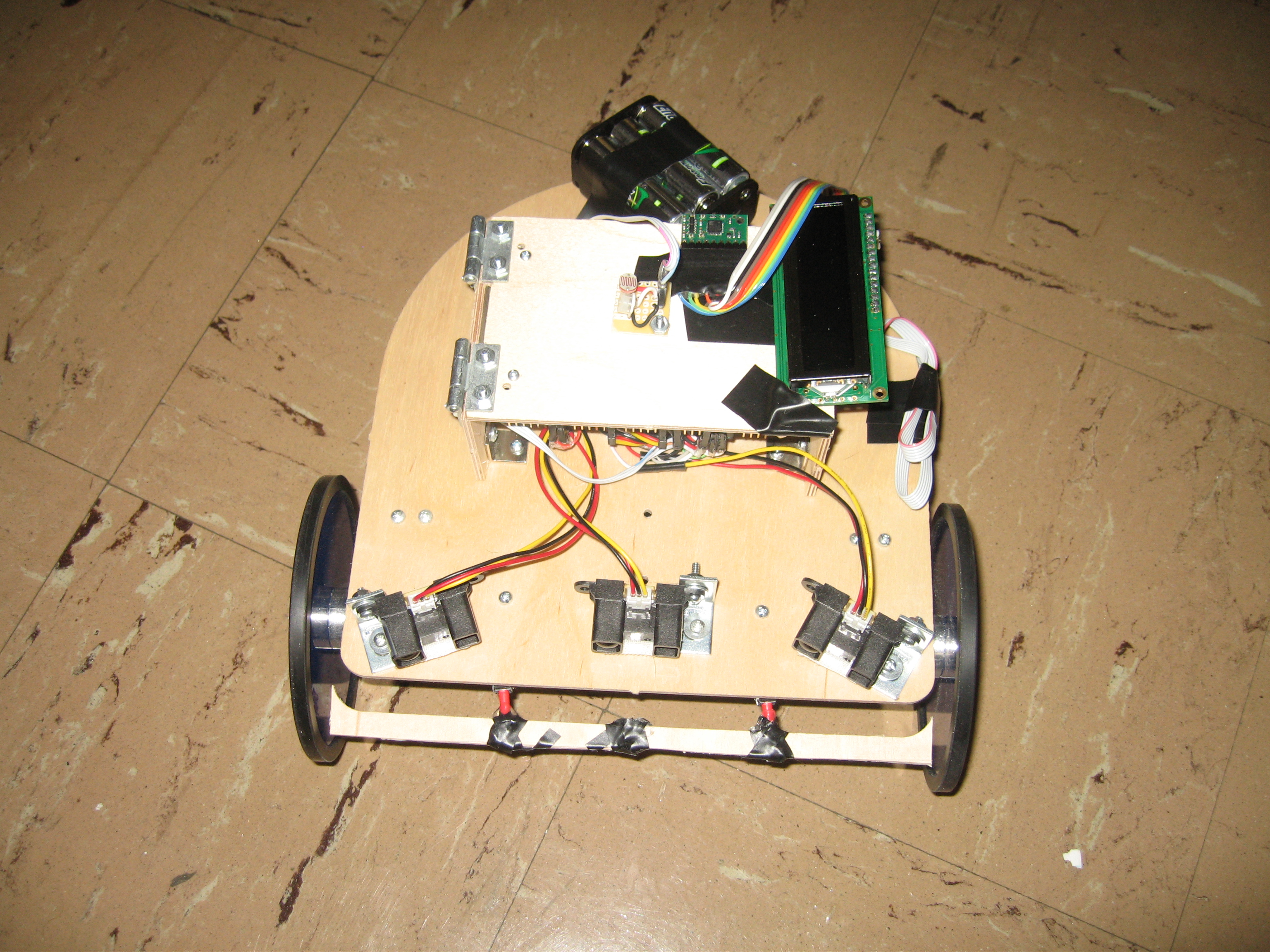
BuggyBot
|
Jennifer Griffith-Delgado |
BuggyBot runs from light, fly swatters, and cold temperatures and flees to her home colony when threatened. |
|
|
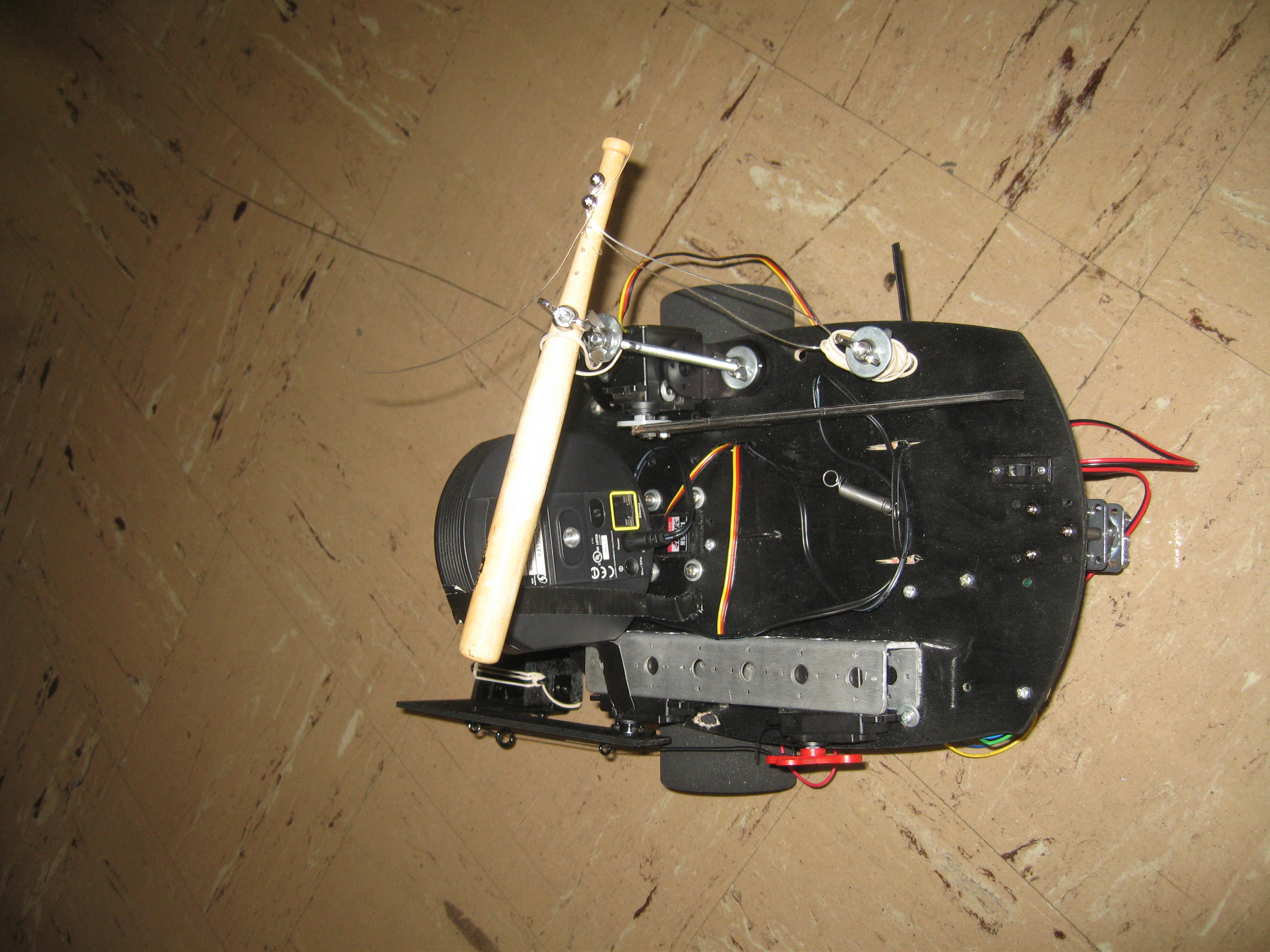
Baseballinator
|
Eric Bennett |
Baseballinator searches for a ball, picks it up, and hits it towards the human player. |
|
|
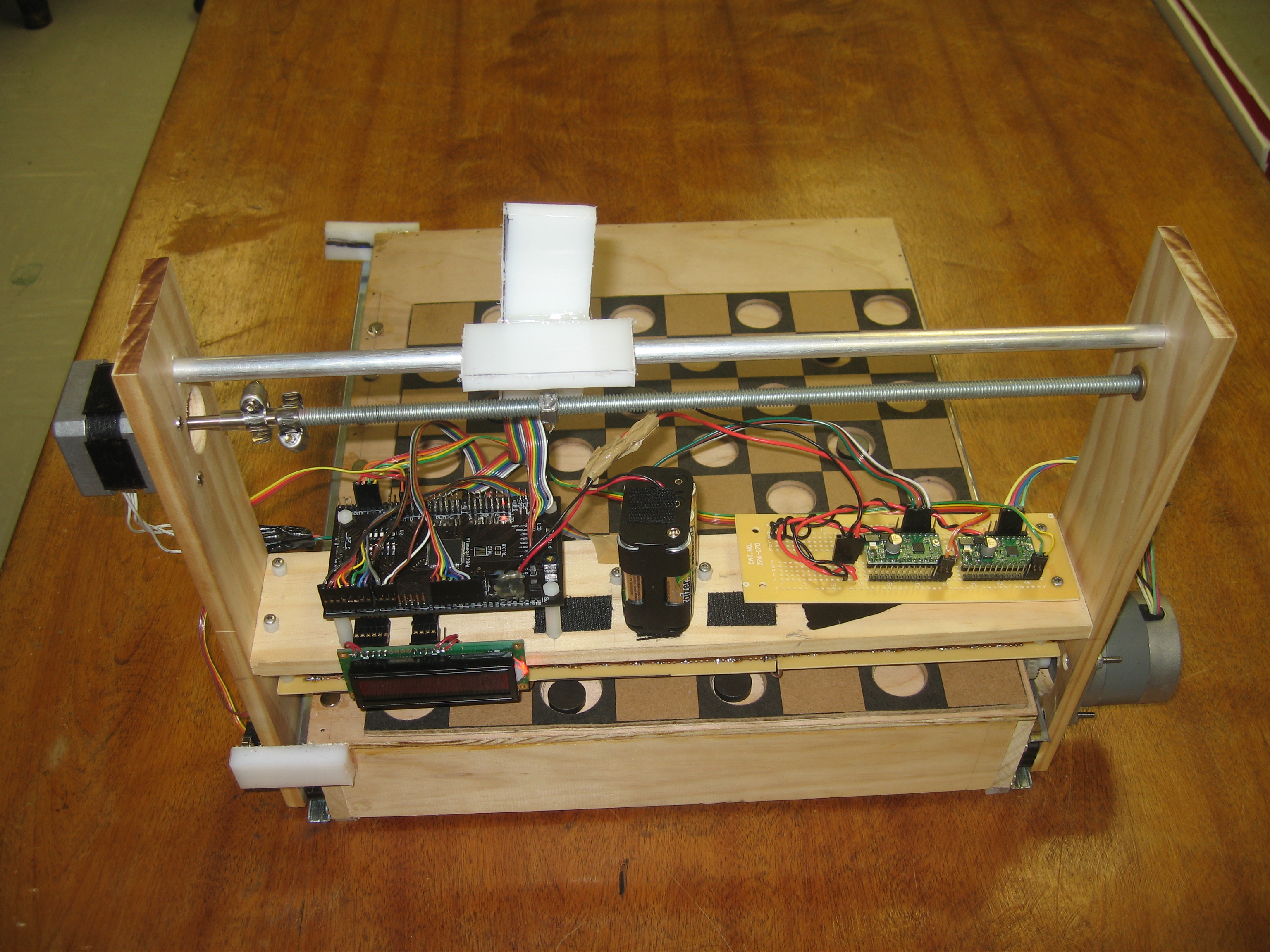
Deep Azure
|
Amanda Reilly |
Deep Azure plays checkers against a human competitor. She can both think for herself and can pick up and move the pieces by herself. |
|
|
Joe On the Go
|
David Dzenitis |
Joe On The Go is an intelligent, full-service, fully-autonomous alarm clock that brews coffee. Joe On the Go will navigate to your bedside, play some wakeup music, bring you fresh coffee, and then return to his home base.Ê After waiting 10 minutes, he will again sound the alarm, at which point you will need to physically get out of bed, turn him off, and start your day. |
|
|
CourierBot
|
Kris Brosch |
Courierbot wanders his environment, looking for objects that he can grab, then take them to different locations based on their color. |
|
|
Echo
|
Michael_Lee |
Echo's mission is to detect and locate a particular acoustic signal. |
|
|
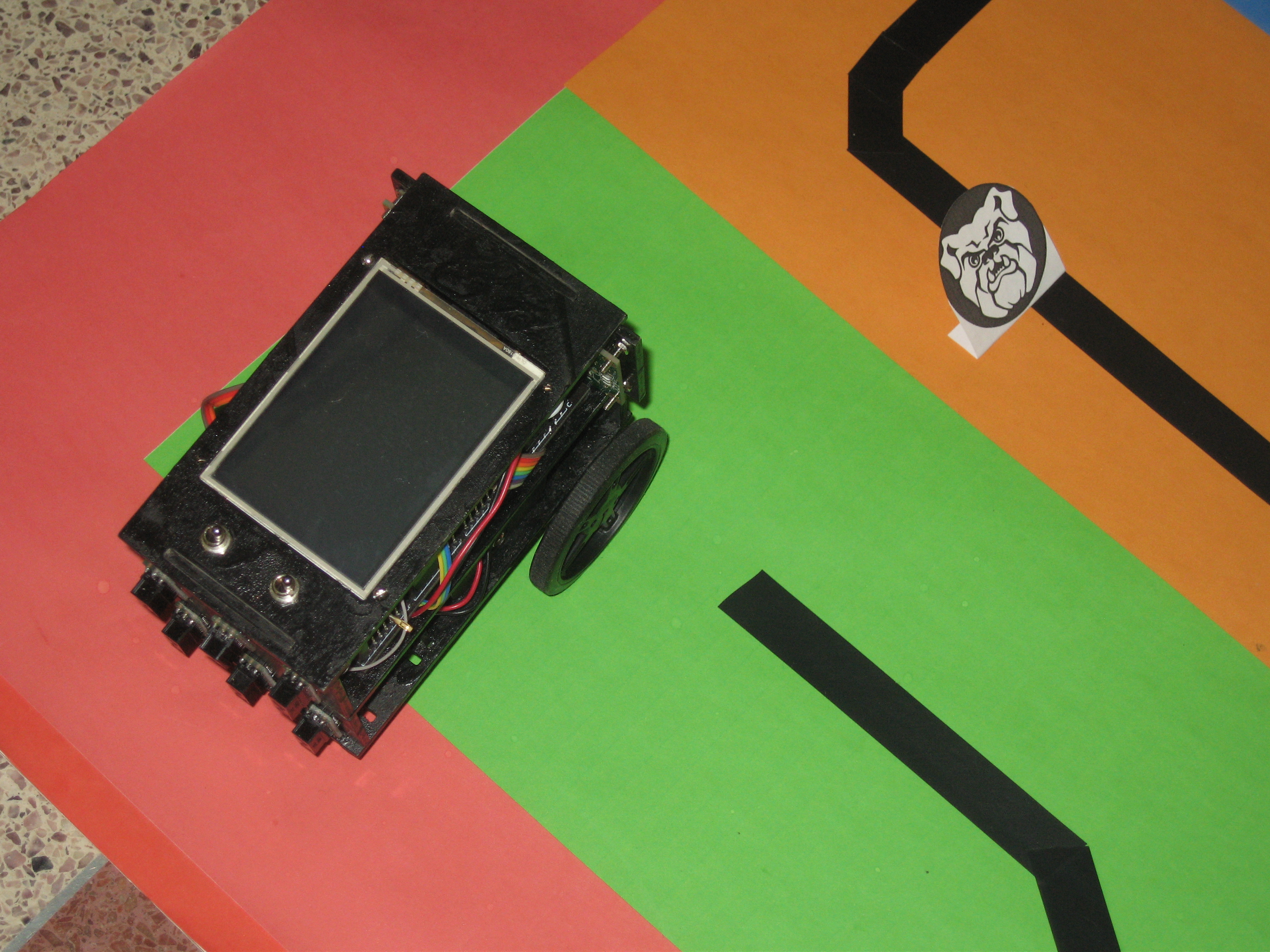
Chameleon Ninja
|
Paul Chao |
Chameleon Ninja is a three-wheeled line follower robot. He will alter his appearance (by changing his color) to match the color of his surroundings. |
|
|
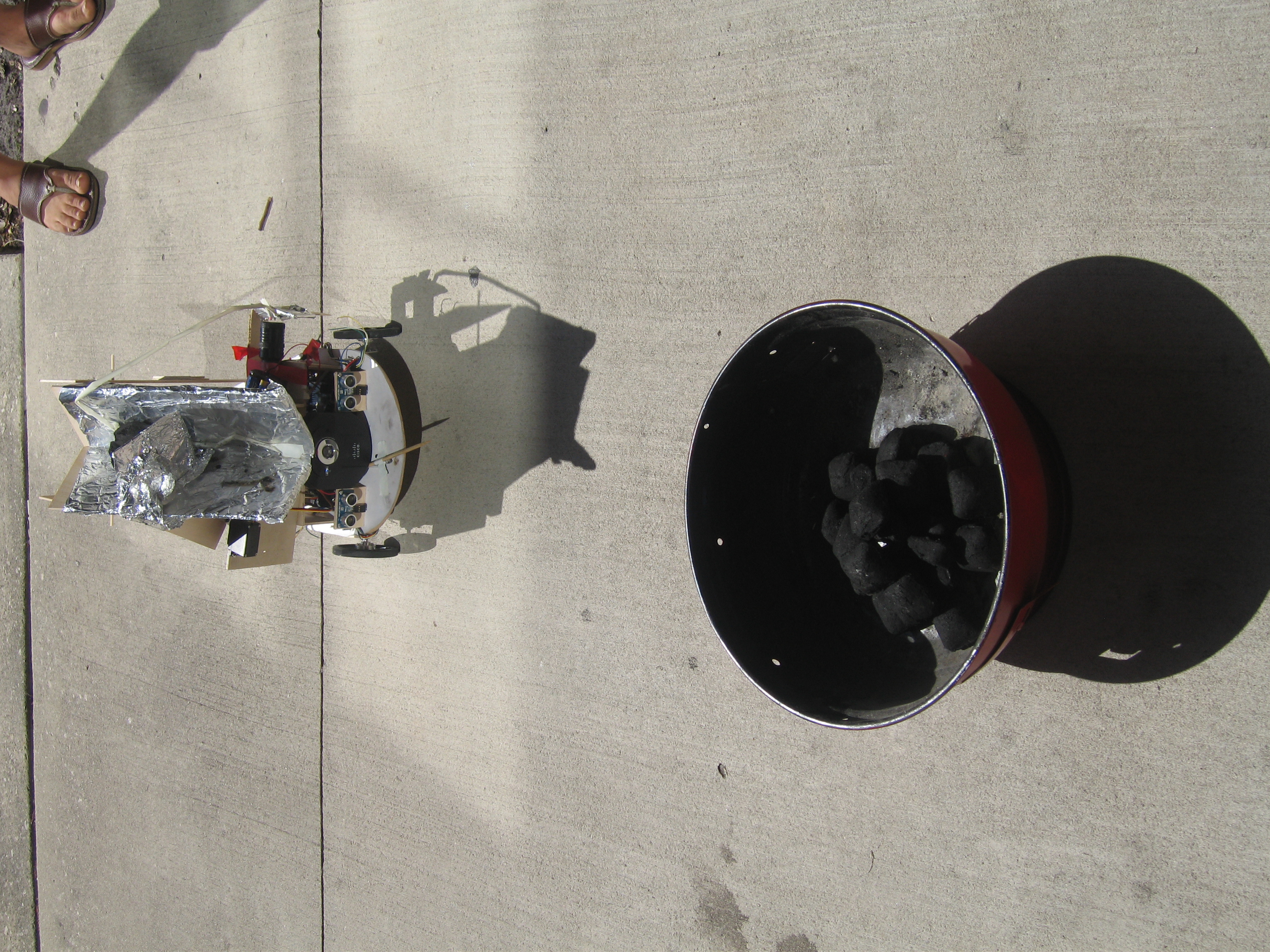
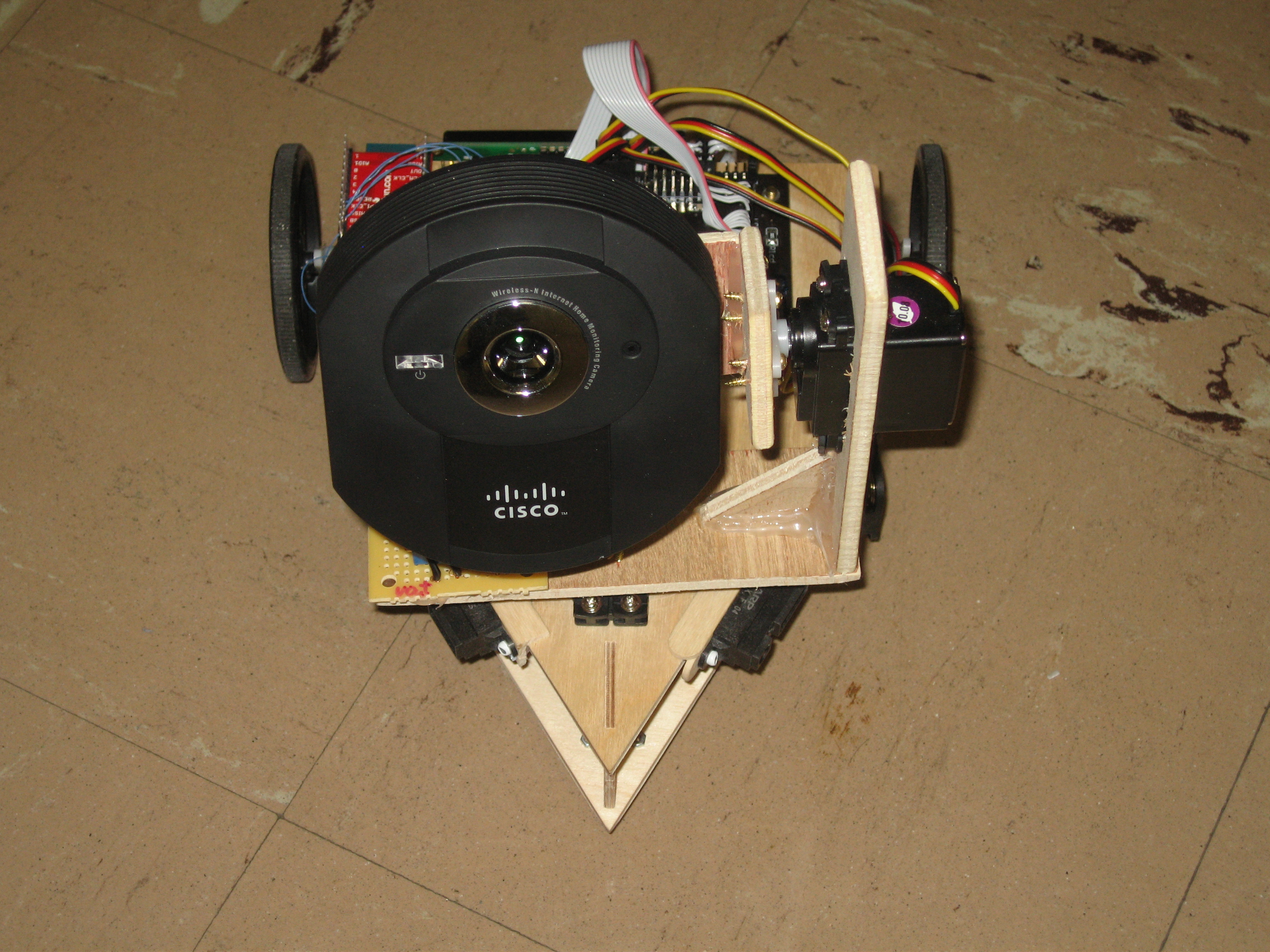
Grill Mate
|
Jared Pasik |
Grill Mate can find a grill. Once the grill is located, Grill Mate will place coals inside and then ignite the coals with his laser. |
|
|
Cyclops
|
Justin Goll |
Cyclops searches for balloons. When he finds one, he uses his laser to pop it. |
Final Report
|
|
Karlor
|
Paul Earley |
Karlor is an quadruped that is capable of walking and finding its target; once the target is found, Karlor will dance around in a circle. |
|
|
Clover
|
Ruibiao Song |
Picking up tennis balls is dull work. Clover will gather tennis balls lying on the ground and put them in her basket. |
|
|
Kinect Kicker
|
Naveen Dhawan |
Kinect Kicker utilizes the Microsoft Kinect to find a ball, wich he will then kick. Other more sophisticated autonomous behaviors may also be demonstrated. |
|
|
Mecha-Patti
|
Ken Orkis |
Mecha-Patti is a 3 fingers robotic hand with 3 degrees of freedom and a fully opposable thumb. The hand will mimic the motion of other hands that it sees. |
|
|
Fireman
|
Jiecheng Chen |
Fireman will find and extinguish a flame. |
|
|
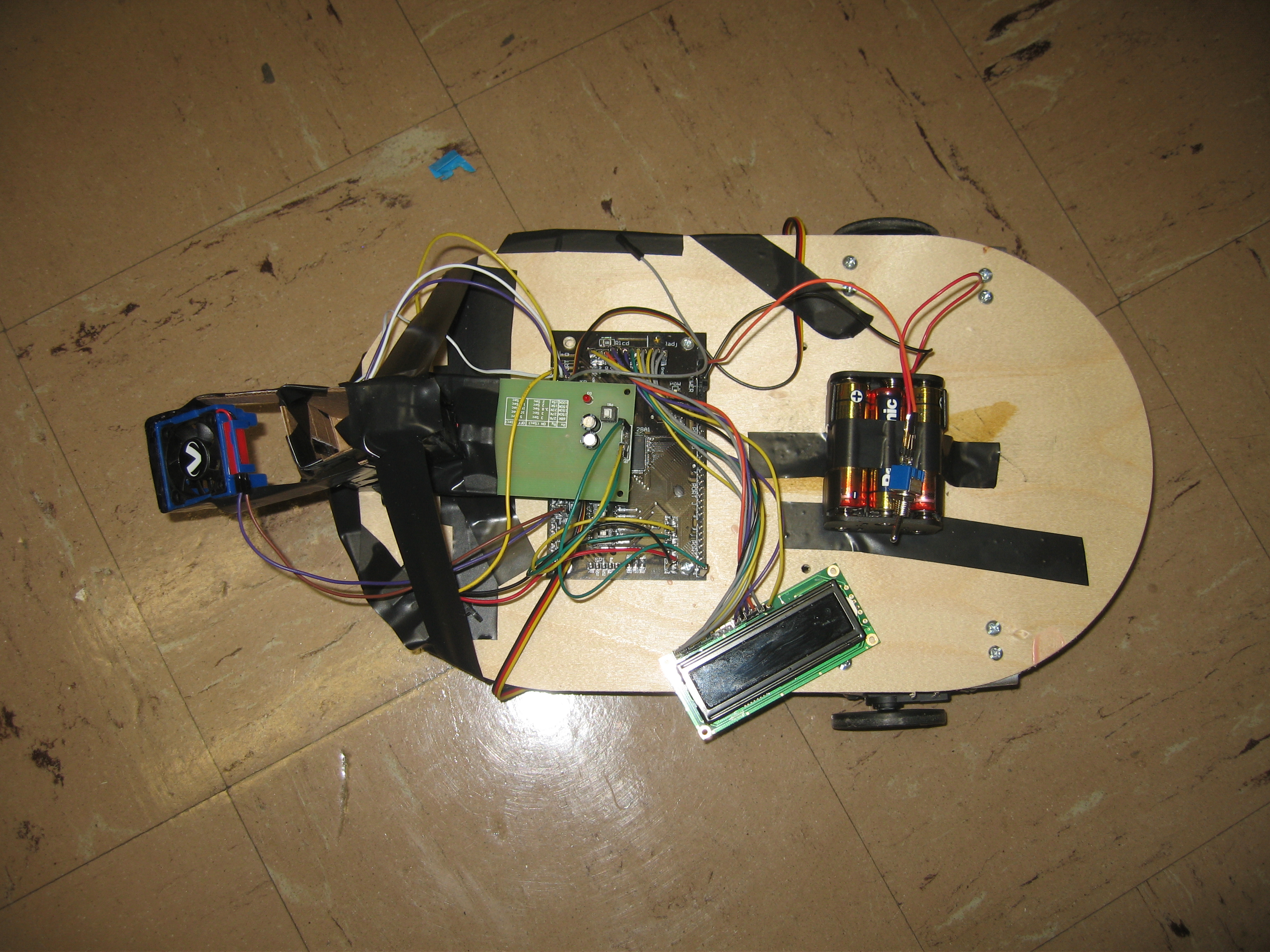
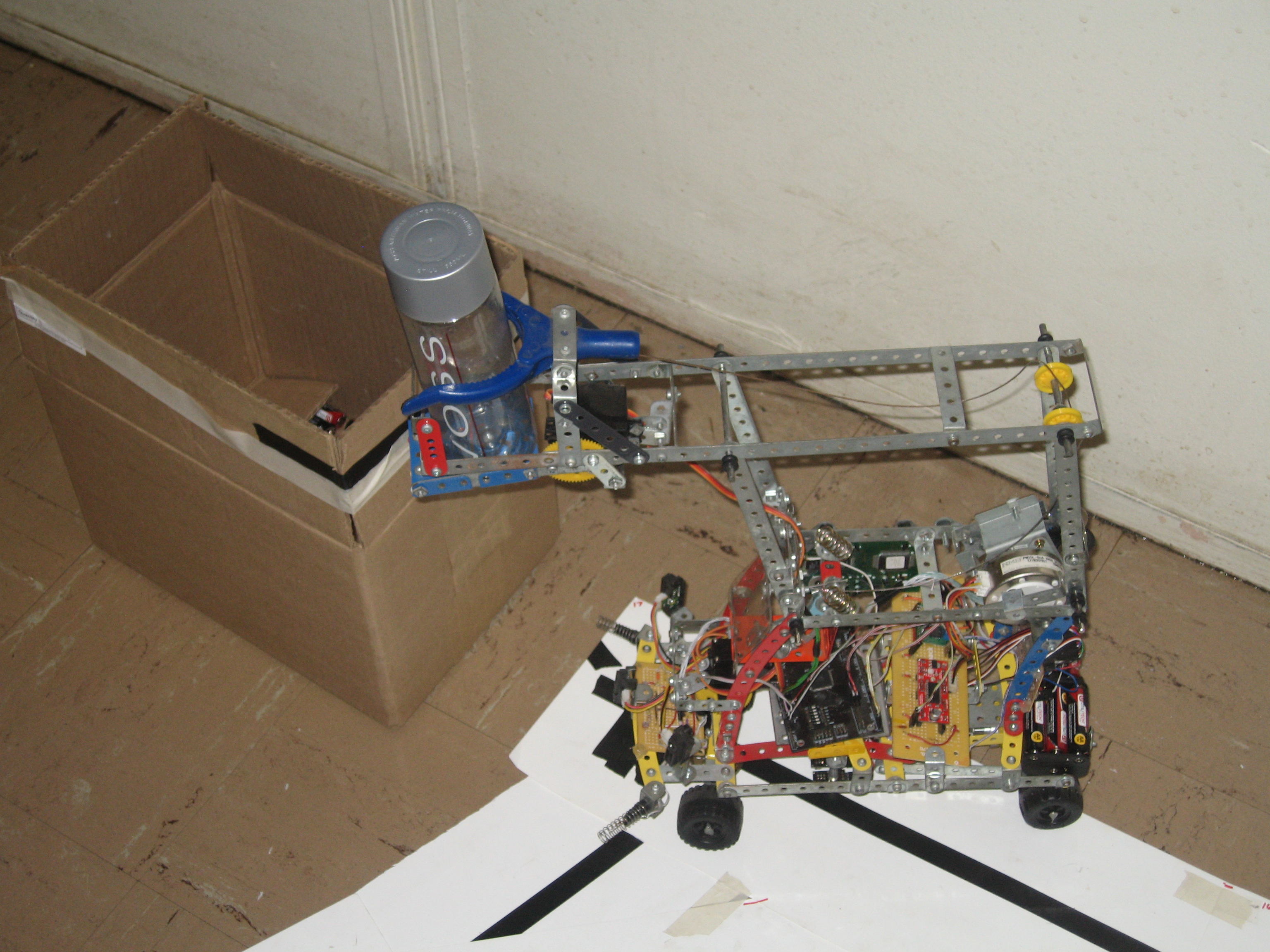
PME
|
Erik Stegman |
PME (Personal Mobile Evacuator) locates an empty bottle. He then brings the bottle to a designated location for proper diposal. |
|
|
Danner
|
Mingwei Liu |
Danner job is to detect victims when danger happens. He can search an area to detects victims (indicated by the color red). Danner will create an alarm when victims are detected. |
|
|
Big Brother
|
Alexander Costakis |
Big Brother follows alongside a person at up to 10 mph while tracking him with a camera and recording to a computer. |
Final Report
|