|
|
Our sixth generation autonomous submarine, SubjuGator, will compete in the
2007 AUVSI/ONR 10th International Autonomous Underwater Vehicle Competition from
July 11-July 15, 2007.
We built an entirely new SubjuGator 6 (both body and electronics) for this competition.
With SubjuGator 6, we upgraded to more powerful sensors and a faster computer
system; we are using Microsoft's Robotic Studio for control and simulation.
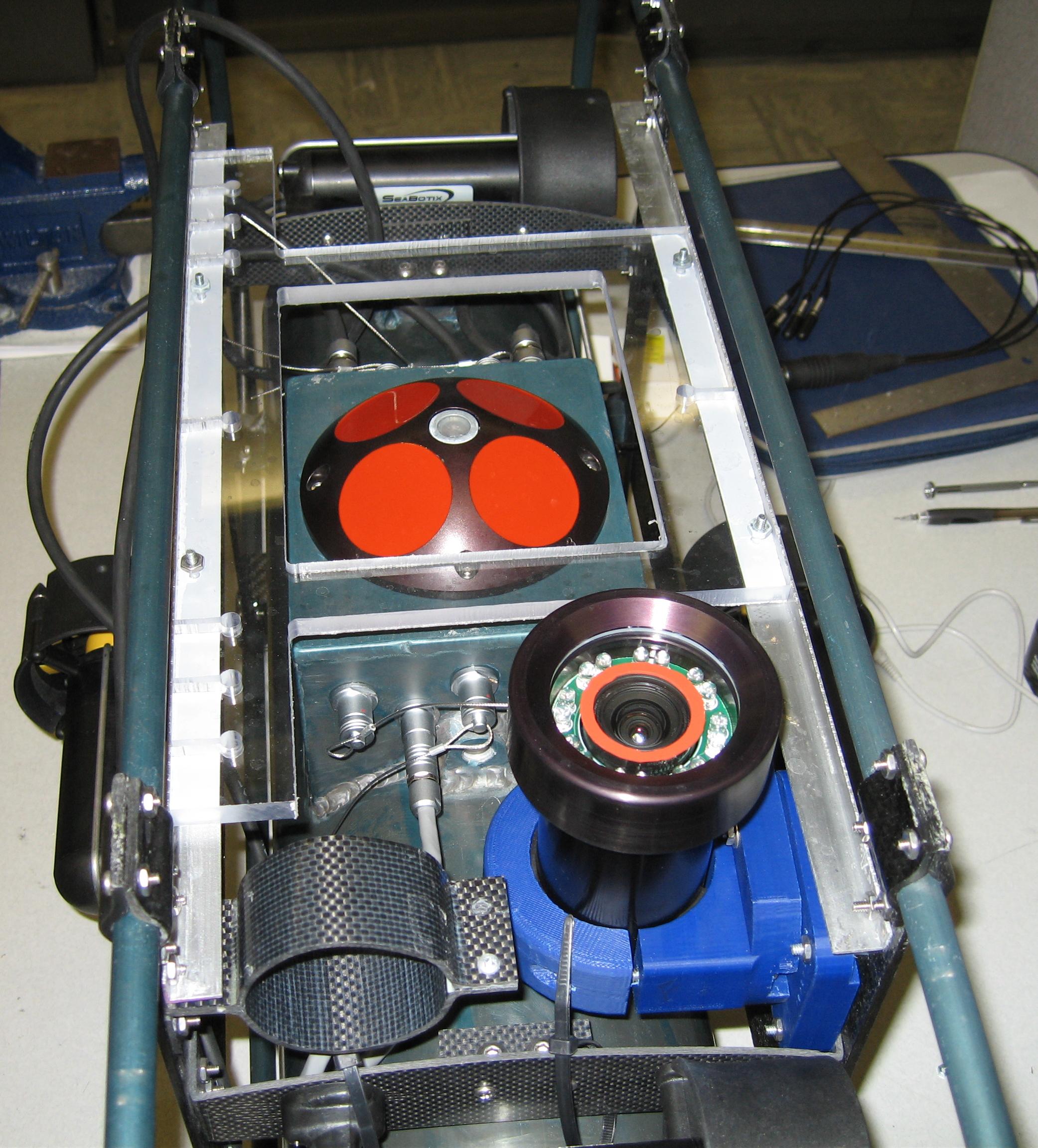
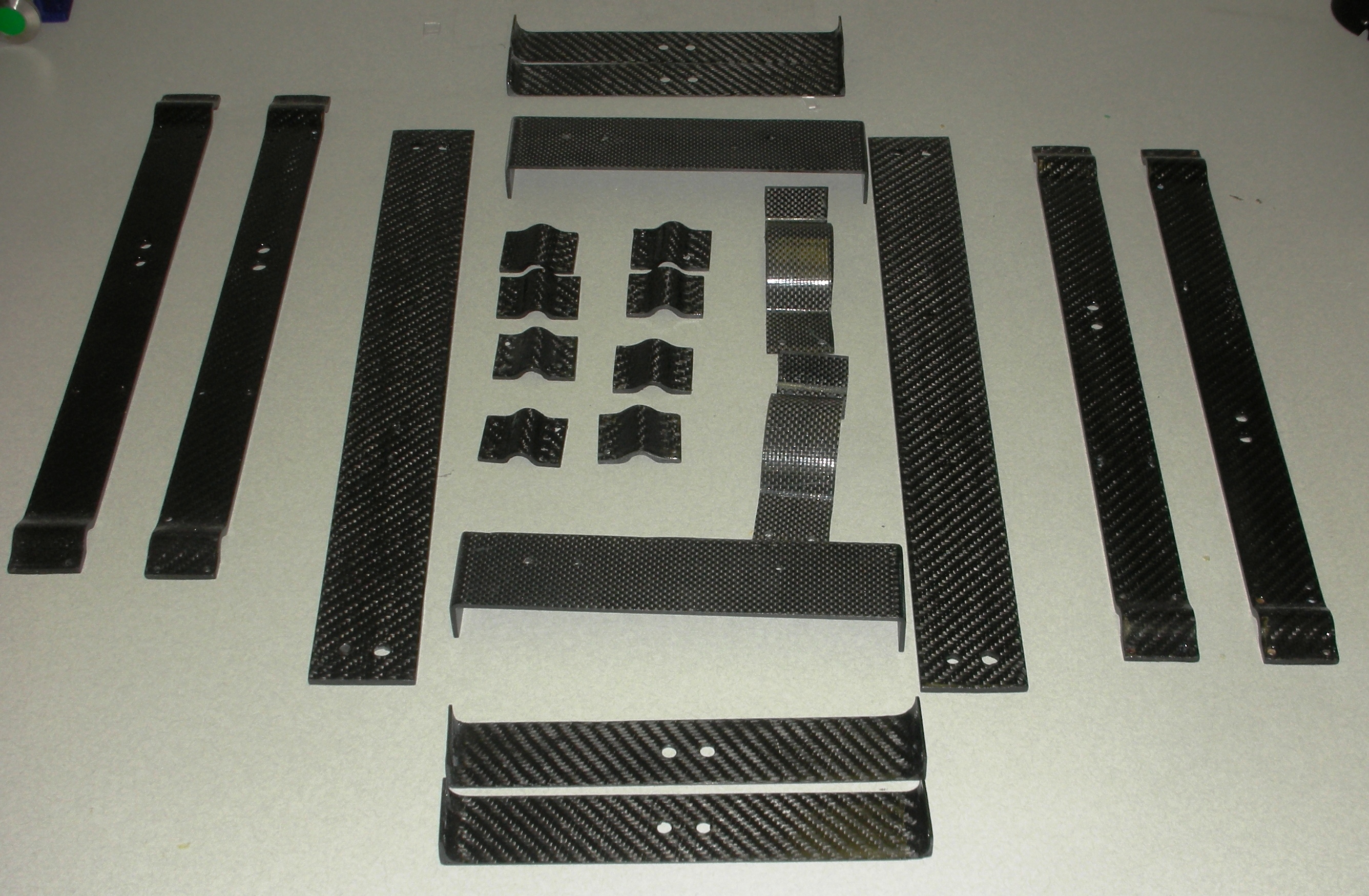
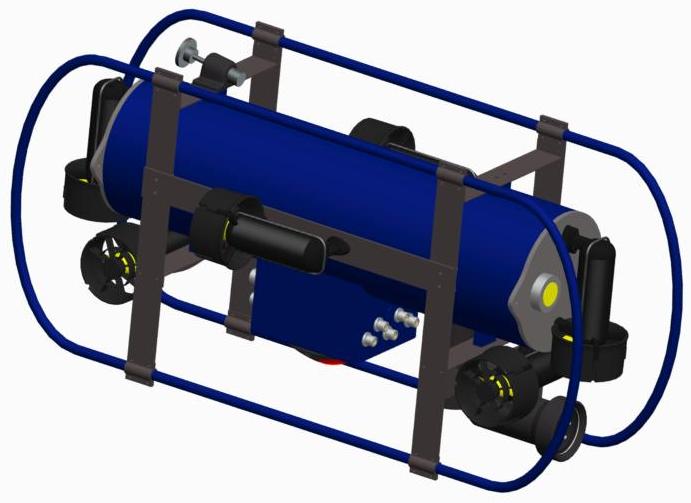
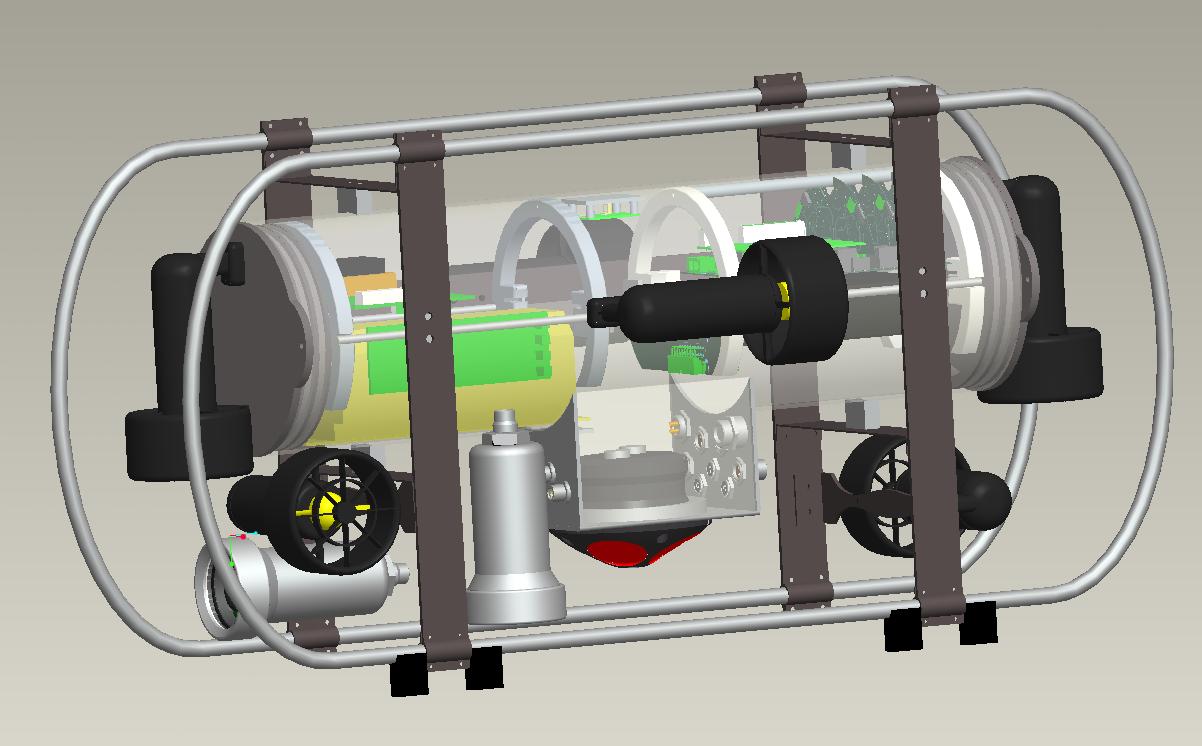
The mechanical system of SubjuGator 6 continues our recent tradition of a small,
light weight, submarine, but also gives us the capability of augmenting it with
more sensors and actuators in the future.
SubjuGator is designed to operate underwater at depths up to 100 feet.
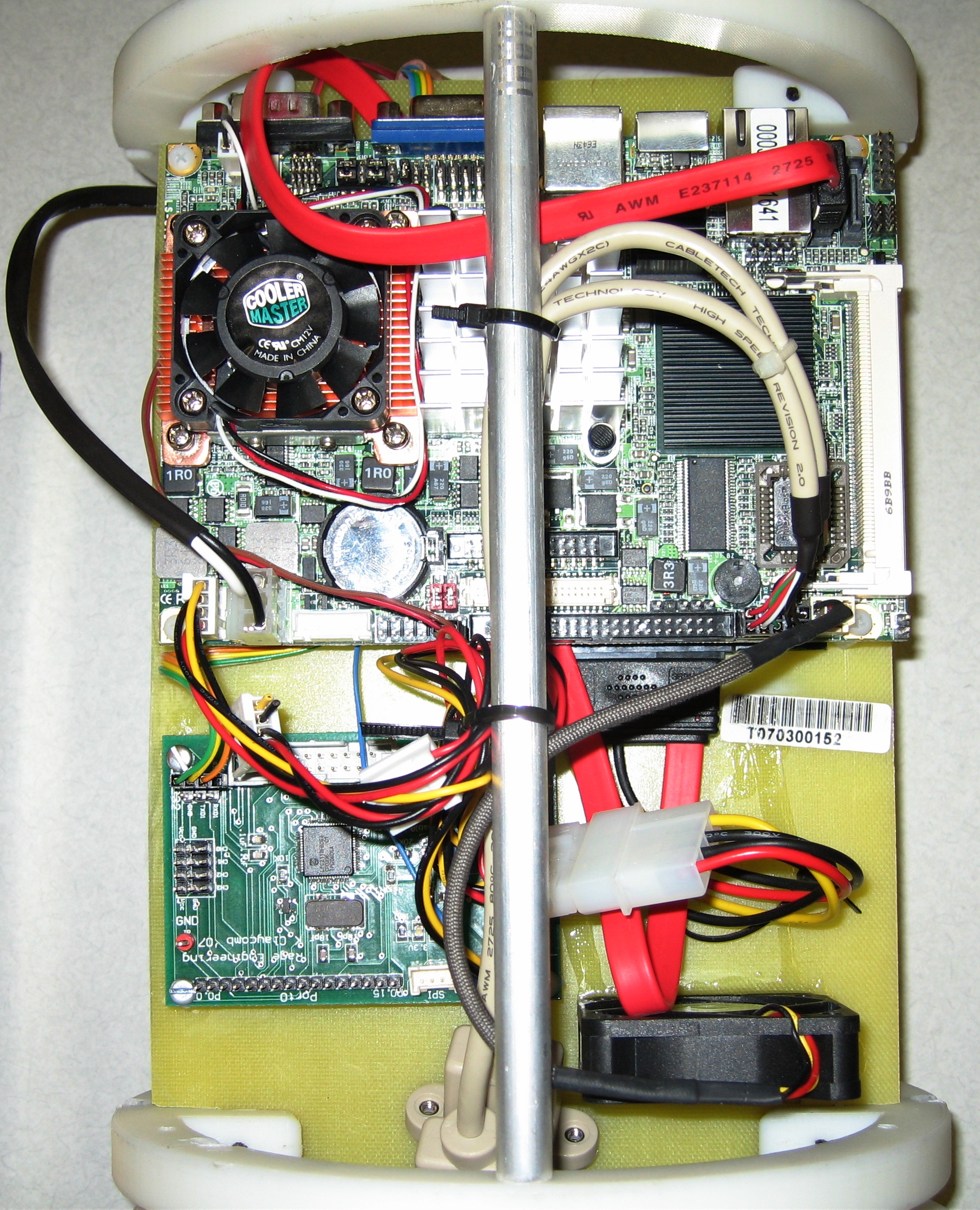
A single-board Intel Core 2 Duo based computer running the Windows
XP operating system provides processing power necessary for
monitoring and controlling all systems. The mission behavior of
SubjuGator is controlled with Microsoft Robotics Studio framework
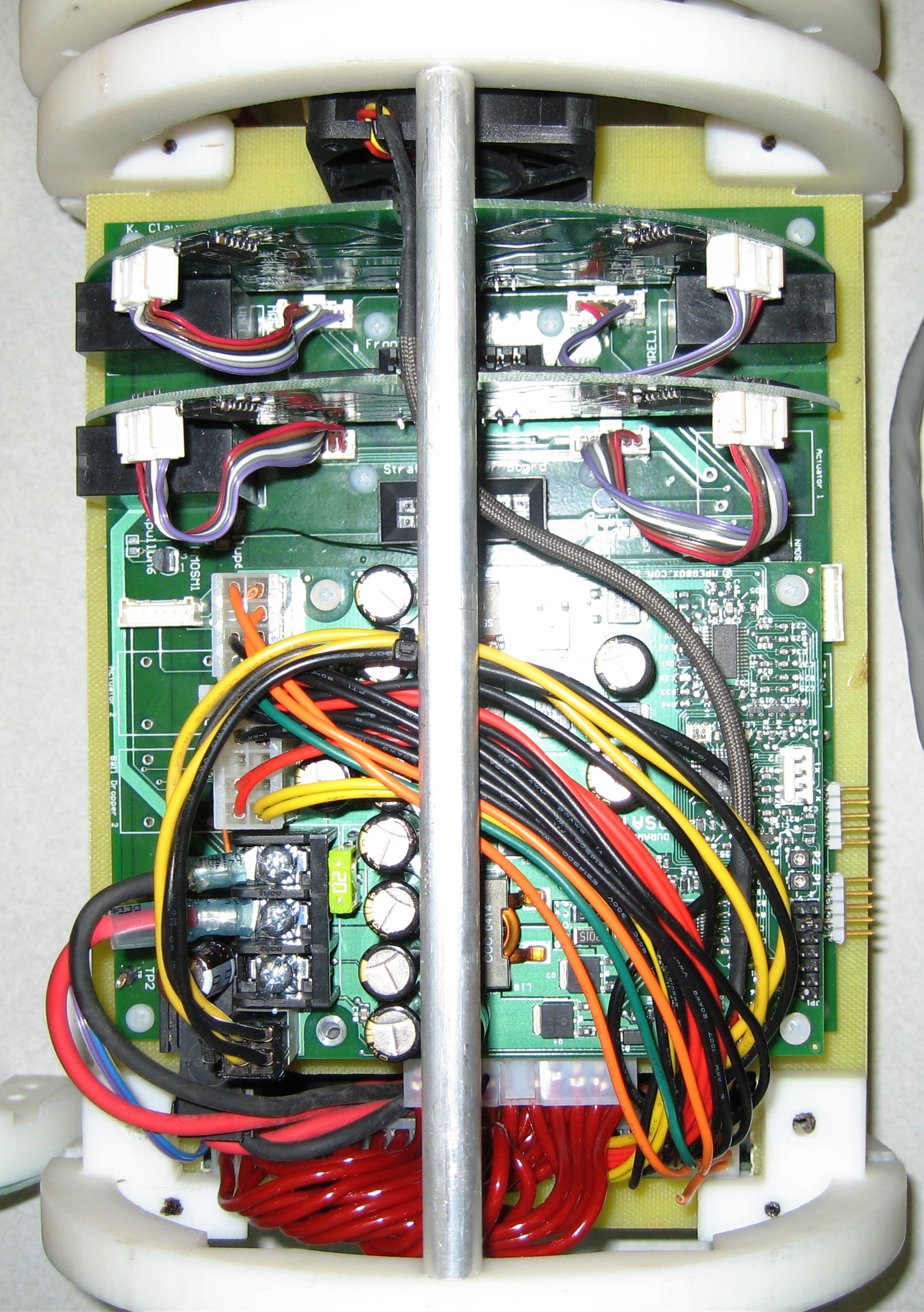
communicating with a network of intelligent sensors. The sensor
systems include cameras, hydrophones, a Doppler Velocity Log,
a digital compass, altimeter, and internal environment monitor sensors.
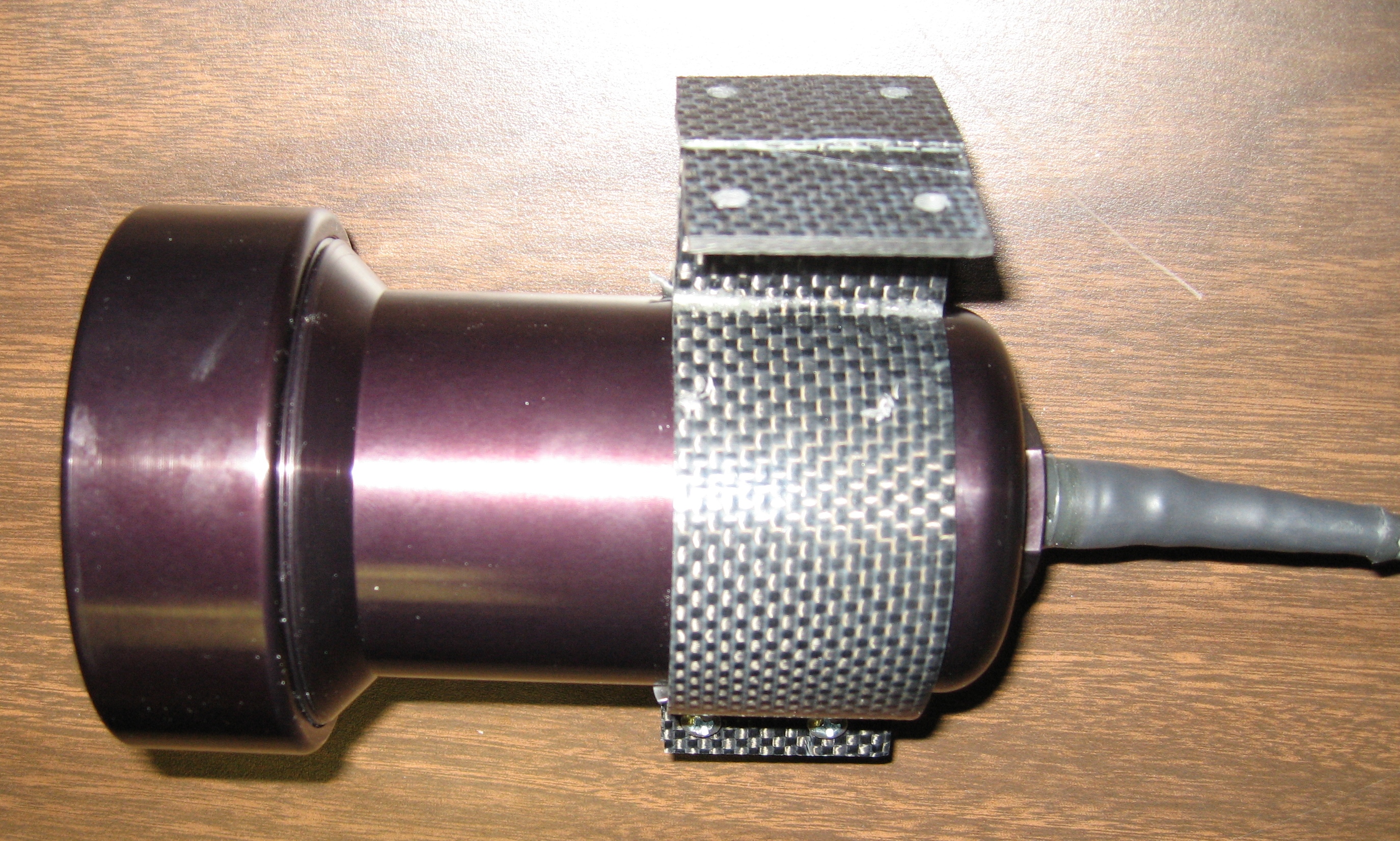
The submarine also makes use of custom designed motor controllers
with current feedback monitoring and other peripherals necessary for
completing the mission.
|
|
|
See more pictures and CAD
|