|
|
A seventh generation autonomous submarine, SubjuGator 7, will compete in the
2011 AUVSI/ONR 14th International Autonomous Underwater Vehicle Competition from
July 12-17, 2011.
BELOW NEEDS UPDATING:
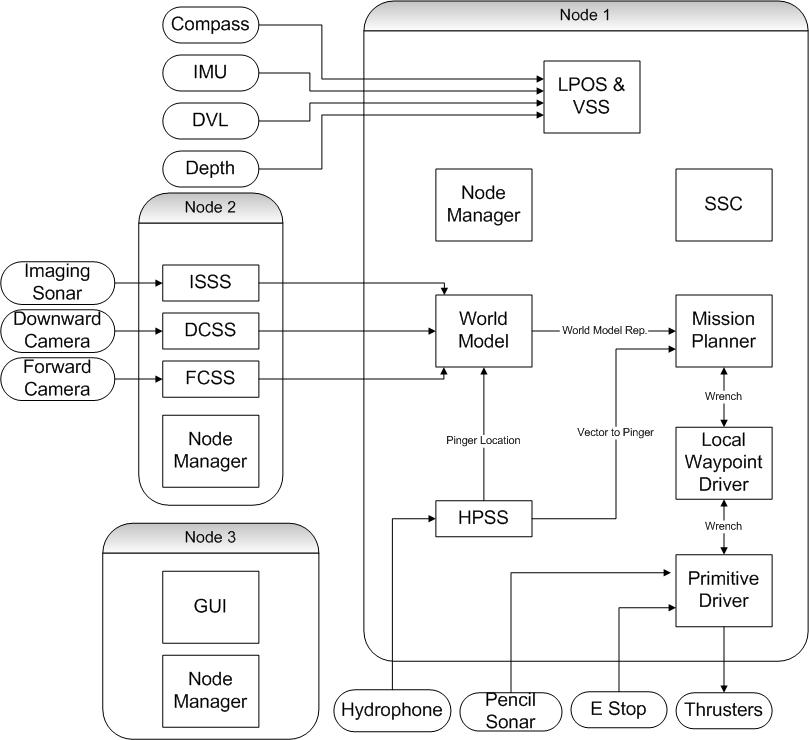
With SubjuGator 6c, the entire software architecture has been redesigned due to a shift from Microsoft's Robotics Studio to the JAUS framework. An IMU has been incorporated allowing for an Unscented Kalman filter to perform sensor fusion tasks between the accelerometers, gyroscopes, magnetometers, pressure sensor, and DVL. The success of the filter has allowed the controller architecture to become a more advanced position based nonlinear RISE controller with an optional neural network for platform dynamics estimation. The motor driver, hydrophone acquisition, and pressure sensor hardware are redesigned and vastly improved. SubjuGator 6c has been updated with two quad core mobile single board computers.
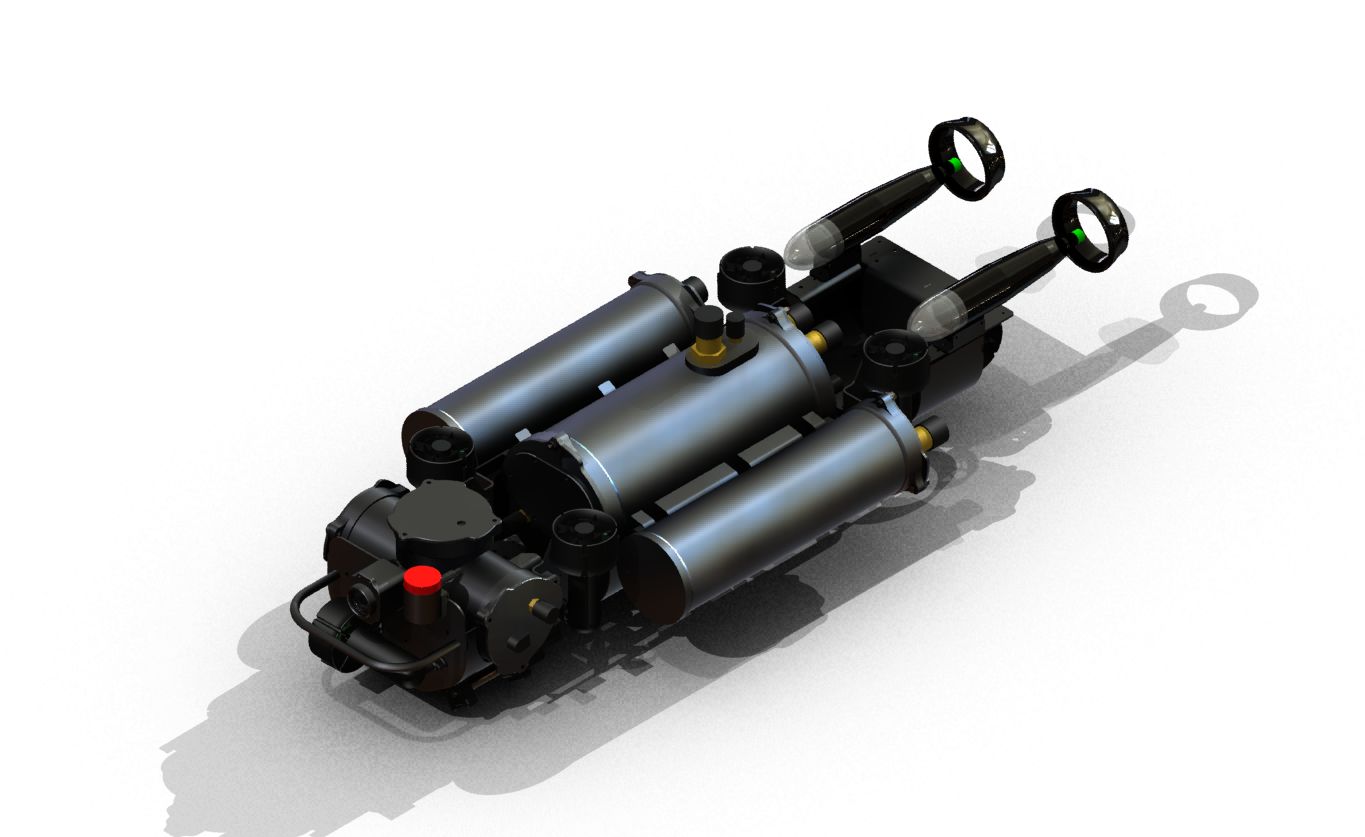
SubjuGator is designed to operate underwater at depths up to 100 feet.
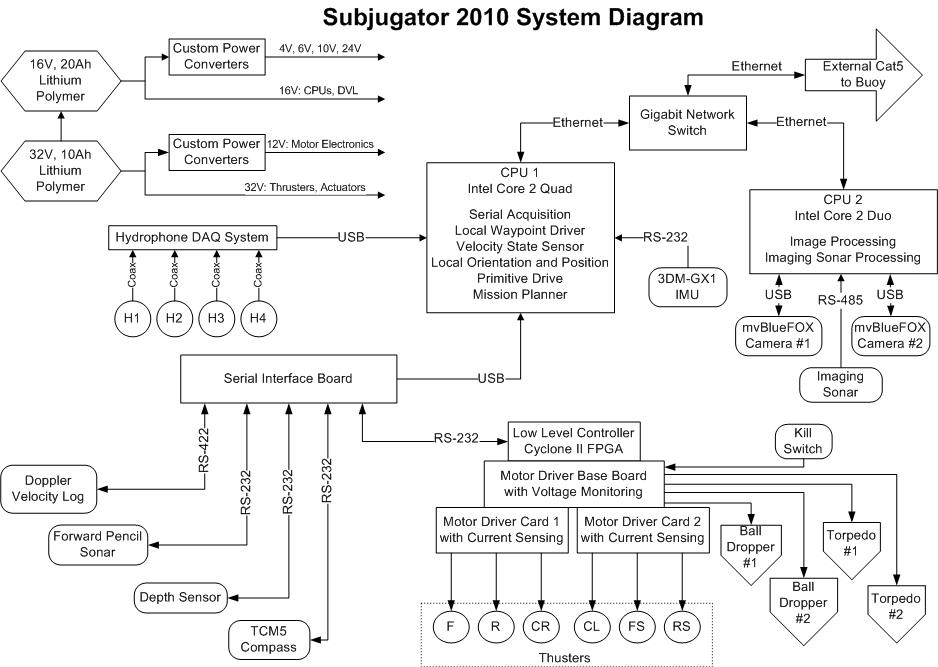
Two 3.5" x 5.75" Intel Core 2 Quad computers running Microsoft Windows Server 2008 provide processing power for monitoring and controlling all systems. The mission behavior of SubjuGator is being developed with the Joint Architecture for Unmanned Systems (JAUS) framework that communicates with a network of smart sensors and components. The smart sensor and component network provides vehicle and environmental state information by processing and integrating information provided by two cameras, hydrophone array, Doppler velocity log (DVL), inertial measurement unit (IMU), compass, depth sensor, and altimeter. The vehicle also makes use of custom-designed motor controllers with current sensing, four external actuators, and other peripherals necessary for completing the mission.
|


|
|