Autonomy Architecture¶
GO-Kart¶
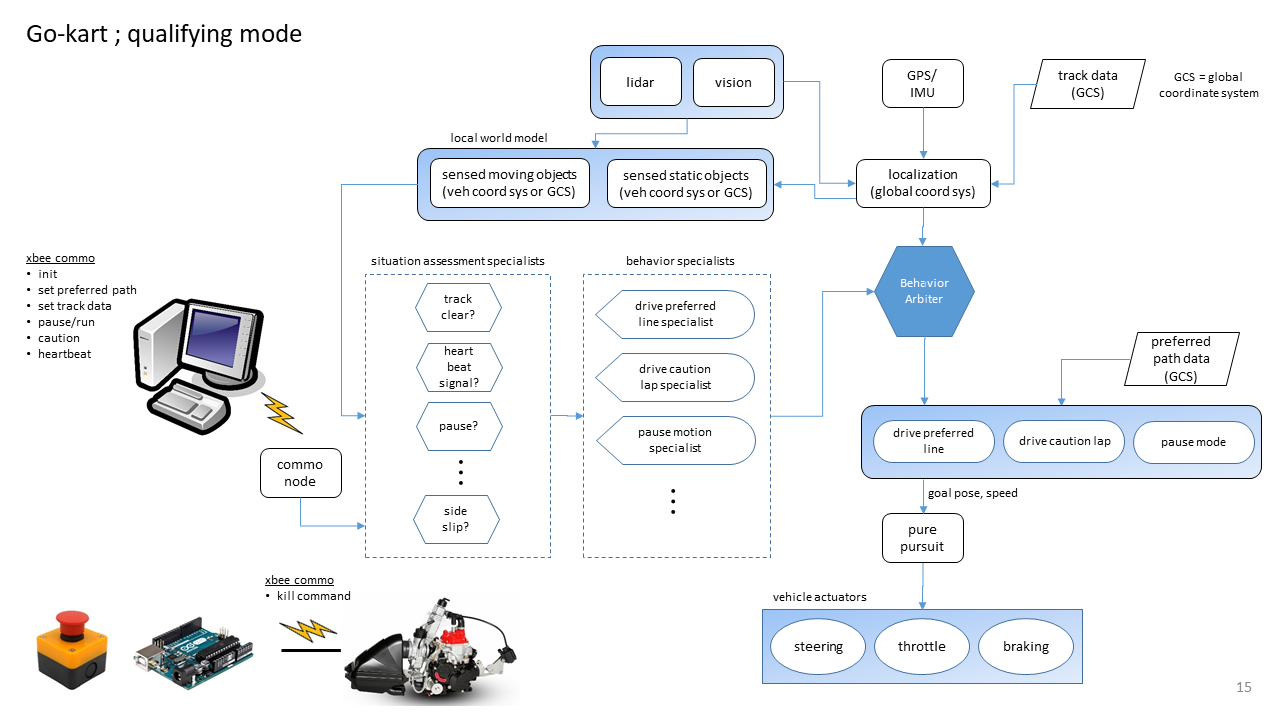
The Go-Kart will be a waypoint following autonomy. The optimal racing line will be supplied aprior and the vehicle will attempt to track the provided racing line.
Indy Light Vehicle¶
In addition to tracking a optimal racing line, the indy light autonomy must also contend with other autonomous racers. This will require decision making and obstacle avoidance behavior.