| Robot | Creator | Description | Final Paper |
CD
|
Ty Black | No description yet |
cd.pdf |
Slappy
|
Louis Brandy | Slappy the robot will wander around inside a maze without touching any of the walls. He will map out the maze as he goes and show the map to a user upon request. | Shaft Encoder Axiom Eval Board |
ABOR

|
Jean-Philippe Clerc | The Autonomous Bottle Opener Robot (ABOR) was designed to navigate on top of a bar and to assist the barman at his task. When the robot detects a beer it uses a five bar mechanism in order to open the beer and then serves it. | Mechanical Design AutoCAD Files Movie (22MB) |
MMH

|
Lee Cofer | MMH, the Magnetic Mine Hunter simulates magnetic mine hunting by randomly searching a designated area for magnets that represent mines. While mine searching MMH also performs obstacle avoidance. | Hall Effect Sensor BB Dispenser |
EDGAR

|
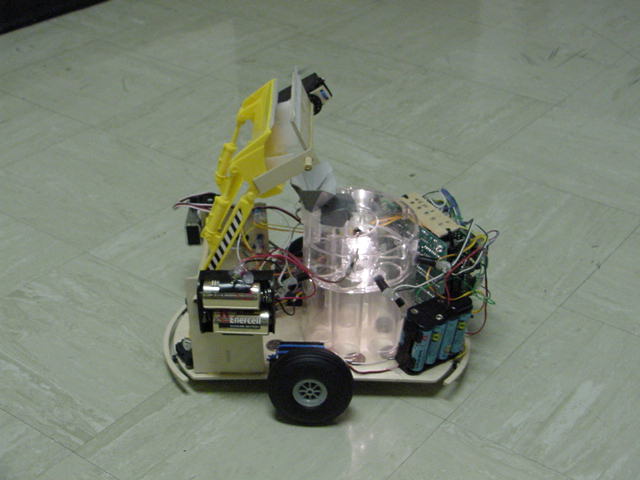
Matthew Cousins | EDGAR, the Empty Drinking Glass Autonomous Retriever is an autonomous mobile agent that retrieves empty drinking glasses or bottles from people. The robot roams around avoiding obstacles and searching for humans. Once a human is found, the robot approaches the human and stops at its feet. It then waits for the human to place the bottle inside the robot. Once this happens, the robot returns the bottle to the desired location and waits there until the bottle is removed. If the human does not place a bottle inside the robot, it turns and searches for other humans. | Pyro-Electric Detector |
STEVE
|
Michael Hattermann | STEVE, the Speed Trap Enforcement VehiclE, is an autonomous speed trap enforcement vehicle. He will wait in his speed trap for a speeder to go by. When he does, STEVE will turn on his lights and siren, chase down the speeder, and pull him over. | 3-Amp Motor Driver Hacking the LITEON IR Detector |
HomerBot
|
Donald Lair | HomerBot is a robotic Homer Simpson. He sings, he burps, he comments on life, he quotes movies, and he even talks about how much he loves Duff beer. All the best (and worst) of Homer in a robot. | Using the Atmel Mega-8L |
ServerBot
|
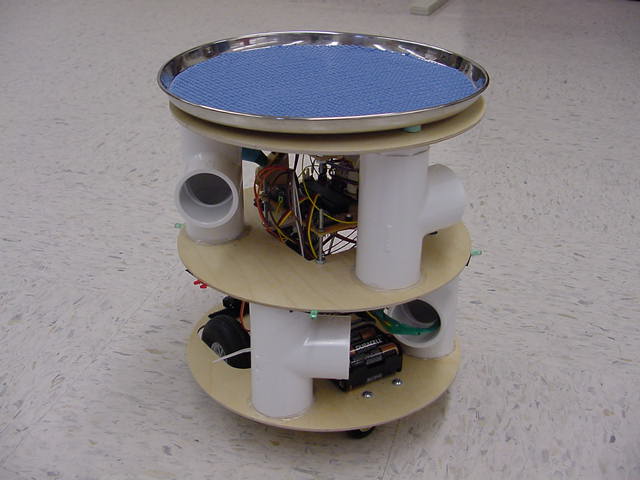
Derrick Moy | The serverBOT is like a robotic butler. It drivers around looking for human targets and heads towards them. Once a human is found, it pauses it enters its dispensing cycle and pauses for 8 seconds. Afterwards it does a random turn a looks for other people. When it detects that its tray is empty or less then its neutral calibrated value, it searches and returns home. | Pyro-Electric Sensor Using the Atmel AVR8535 Code for Atmel AVR8535 |
OPCR
|
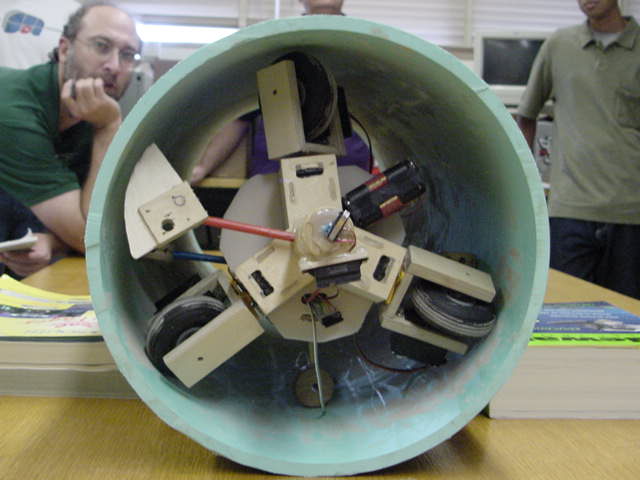
Younghoon Oh | It automatically finds the obstacle, runs back, changes the pitch of the wheel and cleans it. When it does not find any more obstacles, then changes the pitch to the run mode again and runs until the end of the pipe. When the robot reaches the end of the pipe, its work is done. | Video in the pipe |
Drunk Ride
|
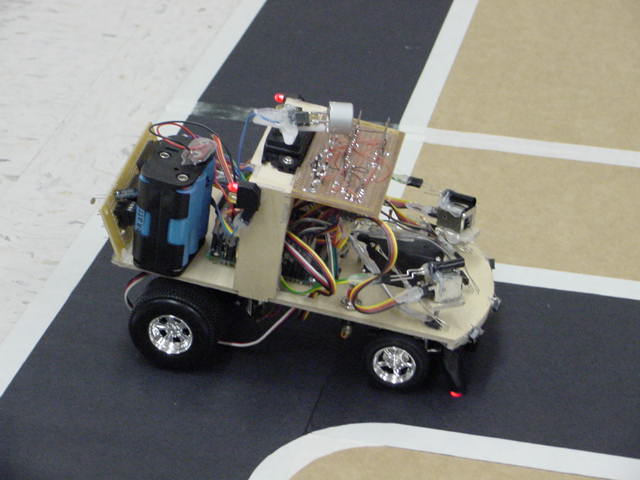
Jonathan Palgon | The robot that takes you home when you've had too much to drink. A 4-wheeled vehicle employing IR, CdS, and Sonar to locate home and return there. | Ultrasonic Sonar |
Ball Sorter

|
Rolando Panez | No description yet | ball_sorter.pdf |
Murry
|
Jonathan Preussner | Murry is a coin-collecting robot. He searches for coins, picks them up, sorts them, and displays the coin type on an LED array. | Metal Detector |
Lemmings
|
Justin Rice | The Lemmings are two small robots that can play the game of Tag. One robot begins the game as it, and once the chaser tags the lead robot they pause, then reverse roles. | IRDA Communications Using the PIC16F877 Microcontroller |
Daisy II
|
Steven Rothen | Daisy II is an autonumous ball fetching robot. She was developed using an Altera FPGA. There is no microprocessor or other bells and whistles on this robot. | Altera FPGA board from EEL4712 |
Gator Aider

|
Daniel Selbst | No Description Yet | gator_aider.pdf |
Archer
|
Ian St.John | The Archer robot consists of two functional units: an immobile target and a mobile robot. The mobile robot will seek out an immobile target platform that has two IR emitter systems mounted on it. One of the emitter systems will be constantly on and rotating. The other emitter will be stationary, and will pulse on when the rotating emitter reaches a set point. By measuring the phase difference between these two signals, the mobile robot will be able to determine its exact position. | IR Beacon IR Beacon Protel Files |
Sister Roboto

|
Philip Thomas | A punching nun robot which seeks out targets in need of a pummeling and attempts to destroy them by punching them repeatedly until they are knocked over. | Using the Philips 80C552 (8051 clone) Flex Sensor |
Fetch

|
Carley Thompson | Fetch is an autonomous robot whose purpose is to entertain. The behaviors Fetch can perform are: obstacle avoidance, release of balls, collection of balls and finding home. | Flex and Breakbeam Ball Detector |
Forker
|
Chad Tobler | No Description Yet | forker.pdf |
EM

|
Vinh Trinh | Moves around on a table top picking up M&M's and sorts them by color. Also detects the table edge to avoid running off of it. | Color and Edge Detection |
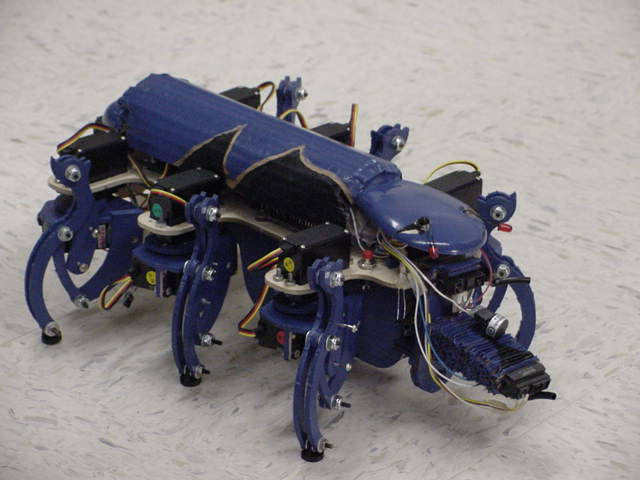
Spider Walker
|
Garew Walker | This six-legged walker seeks a light beacon as it avoids obstacles and uses a height detector to determine if it can crawl under an obstacle. If there is enough clearance under the obstacle, it will squat and crawl under it. When it reaches the goal, it unloads its cargo. | Interfacing the MSCC11 and the MTJPRO11 AutoCAD Drawings |
SID

|
Lavi Zamstein | No Description Yet | sid.pdf |