IMDL Fall 2010 Final Reports
|
Robot |
Creator |
Description |
Final Paper |
|
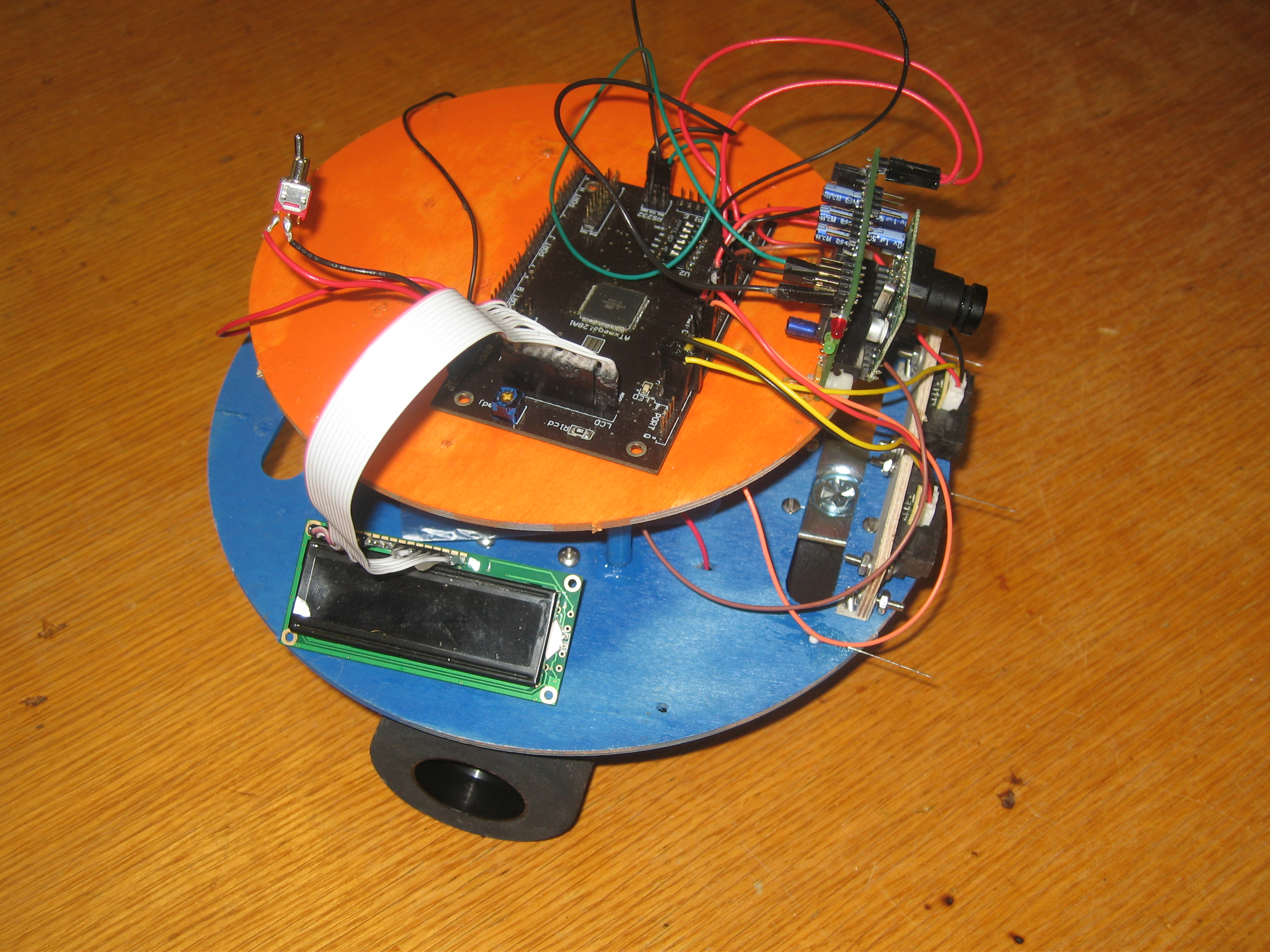
Ronic
|
Alexis Mesa |
Ronic will search for an empty cup. If the cup is
the correct color, Ronic will refill the cup and then start looking for another
empty cup. If the cup is not the correct color, Ronic will NOT refill the cup.
|
|
|
Minesweeper
|
Anup_Parikh |
Minesweeper is a mine locating and deactivating robot. It uses a camera to "see" the IR beacons located on each mine, and disables the mine with a magnetic field. |
|
|
Cuppy
|
Cheenu Madan |
Cuppy job is to find and move red plastic cups.Ê Once Cuppy finds several cups, she will carry the cups to a disposal area where the cup must be removed by another agent.. |
|
|
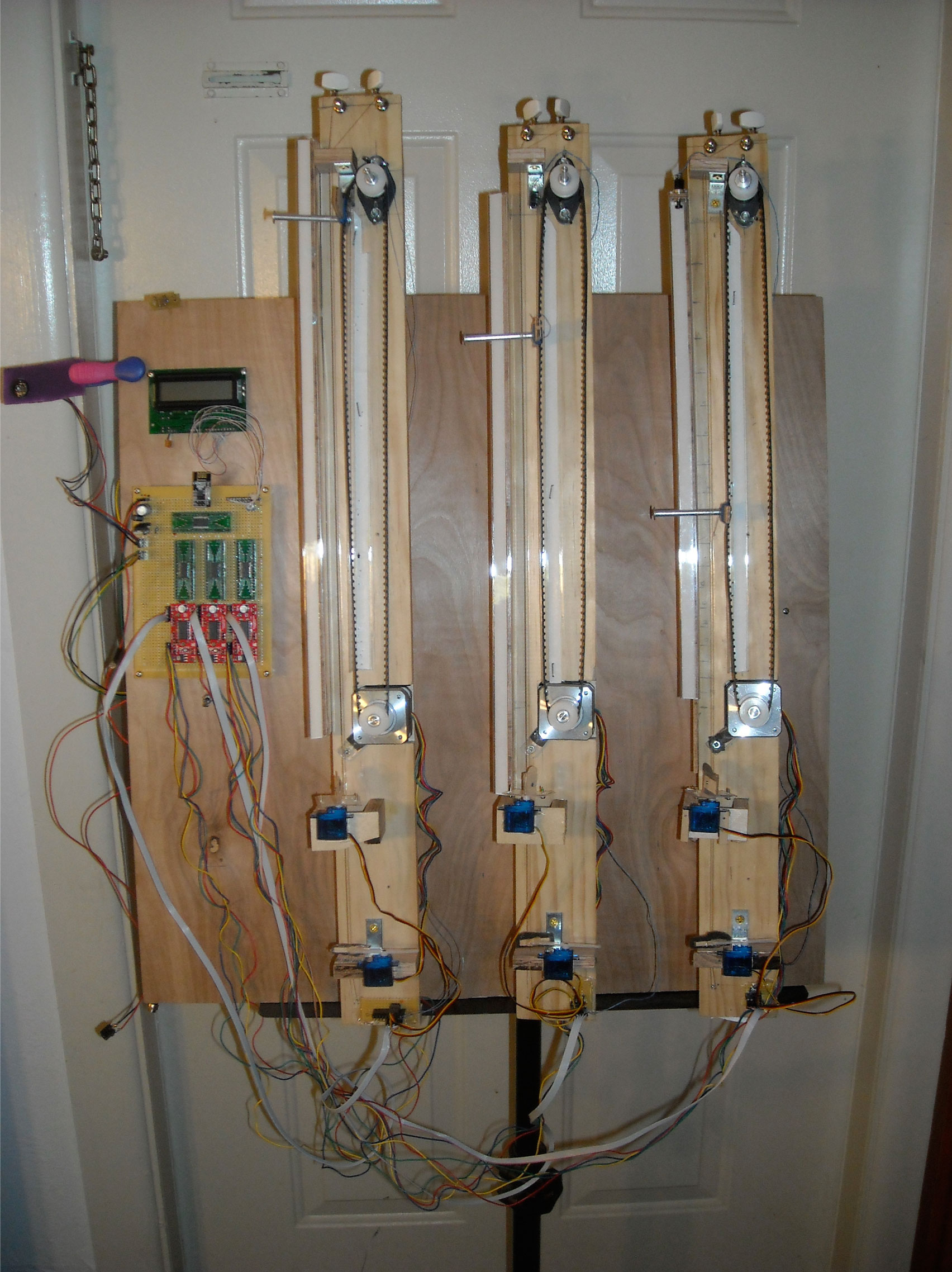
MIRAG
|
Chester Udell |
MIRAG (Musically Intelligent Robotic Algorithmic Guitar) is a guitar-playing musically-autonomous robot that is made up of 4 or 5 monocords.Ê Each monocord has its own pair of strings tuned in octaves to a particular pitch, motor, belt, tuning keys, and servos.Ê The music MIRAG will make is based on environmental sensors. This info will be used create real-time musical improvisations by determining scale, tonic, tempo, and other parameters that determine musical "style." |
Final Report
|
|
Robot Spotting
|
Courtney Hayes |
A group of robots will play tag. The objective of the game is for one of the robots is to identify and disable the others ones as they move around. |
|
|
LC-113
|
Darsan Patel |
LC-113 is a laser chasing robot, controlled by a laser pointer. To control the her, provide a path by shining the laser on the ground. |
|
|
BevBot
|
David Register |
BevBot is an autonomous beverage-retrieving robot. BevBot receives a drink order from a user, navigates to a bin from which it retrieves the beverage, and returns with the beverage to the location of the order. |
|
|
Atheris
|
Devron Lee |
Atheris is a high-speed autononomous ground vehicle for reconnaisance and tactical missions. |
Final Report
|
|
Seek and Destroy
|
Evan Wall |
Seek and Destroy locates a target and then attempts to hit the target with a plastic ball. |
|
|
SVBot
|
Greg Brown |
SVBot uses two cameras to identify a target and its relative distance. SVBot then launches projectile towards the target using an arched trajectory to prove it has calculated the distance correctly. |
|
|
SeBAARD
|
Jason Reeder |
SeBAARD is dog that loves to annoy his owner. He wakes up and starts searching for his owner. SeBAARD will then approach his owner and then commence barking in an annoying manner. The owner is able to stop SeBAARD's barking by using a dog training whistle.Ê When SeBAARD hears the whistle, we will whine and then run away. |
|
|
Sentry Wizard
|
Jeremy Fowers |
Sentry Wizard Sentry Wizard's purpose is to do real time motion tracking of unmarked, moving objects in everyday environments using a powerful embedded FPGA. Once a moving target is acquired, its future path will be predicted and the robot will attempt to hit it with a projectile. |
|
|
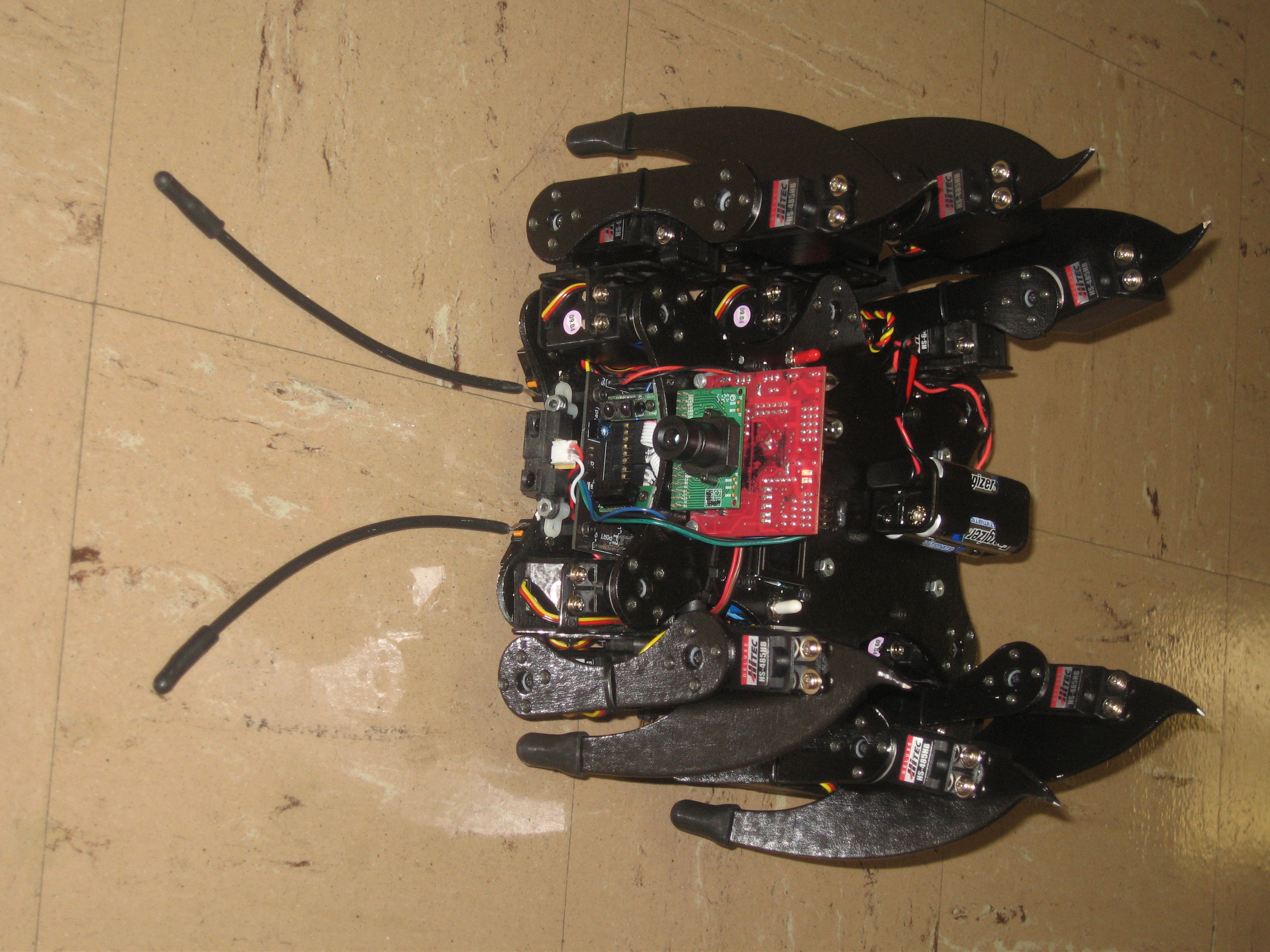
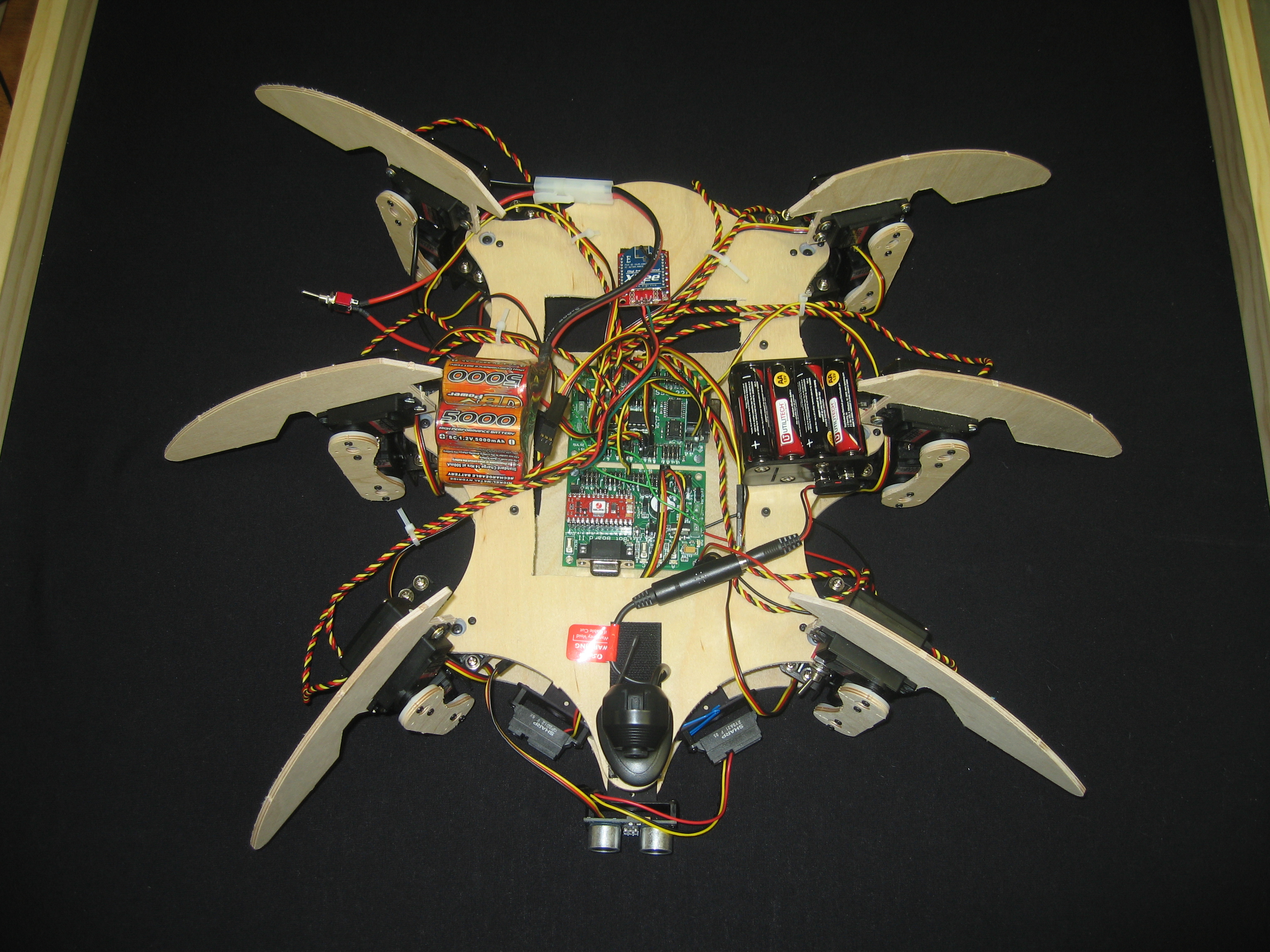
SPDR
|
Joshua Weaver |
SPDR (Security Patrol and Defense Robot) is a 6-legged hexapod security robot. SPDR's main directive is to detect and warn it's owner of a possible intruder. |
|
|
Safesweep
|
Joseph Magana |
Safesweep can locate small metal debris from runway or road surfaces and sweep it up. Safesweep drives around until it finds metal, at which point he activates a rolling brush and drives over the debris to collect it. |
|
|
Balloon Buster
|
Jistin Lu |
Balloon Buster scans an area for balloons. When she finds one, she heads towards it and pops it. |
|
|
HexaBob
|
Justin Montgomery |
HexaBob has six legs that have 6 degrees of freedom for each leg. He will be able to detect a colored object and grab it with pincers attached to the front. |
|
|
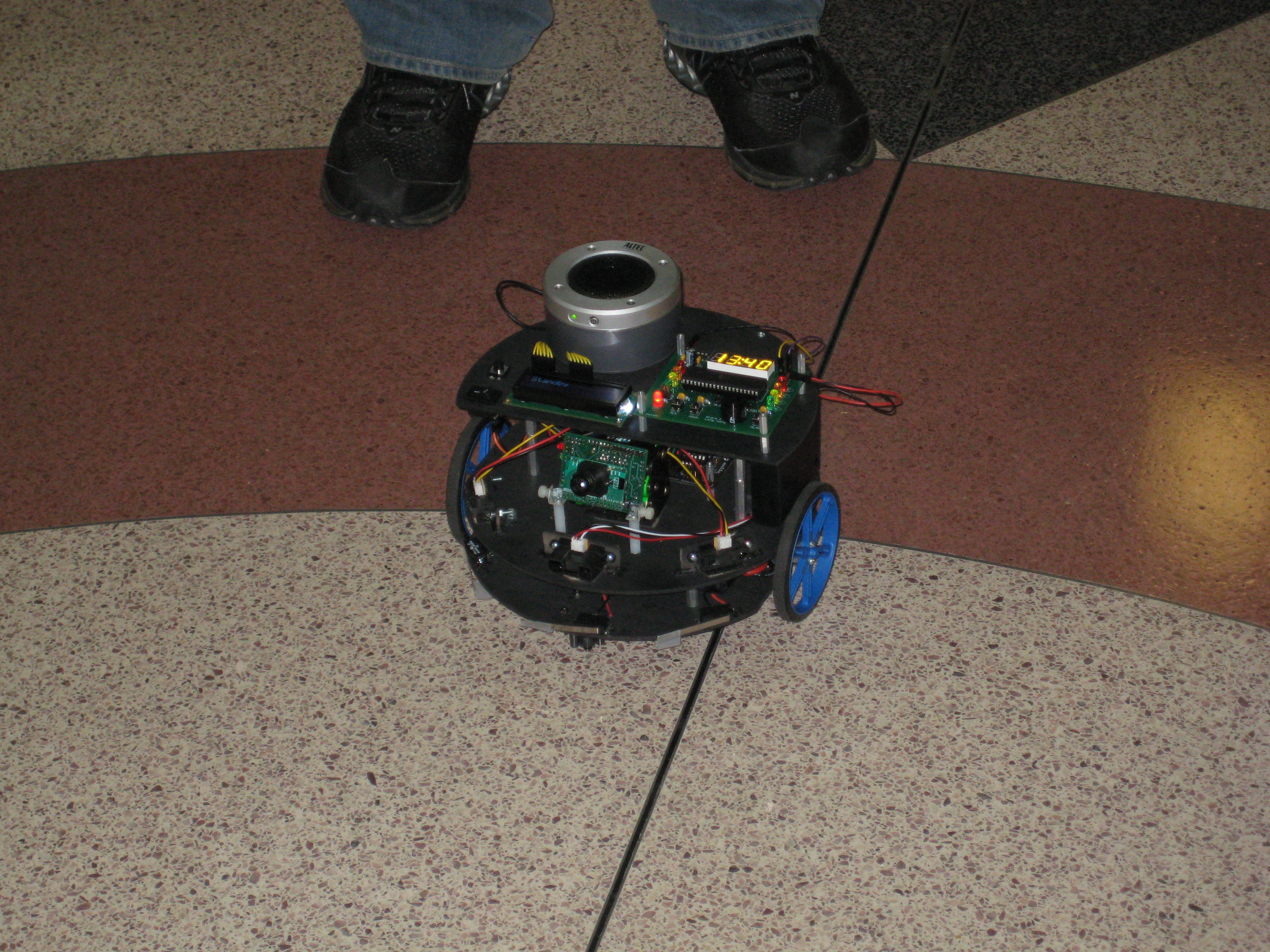
Buzz
|
Long Vong |
Buzz goals are to wake a person and to keep the person awake. At a set time, Buzz will wake up and sound an alarm; to prevent the person from just hitting the snooze button, Buzz will run around the room. The person will have to get out of bed to catch Buzz. If he does, then Buzz will track and follow the person until she leaves the room. |
|
|
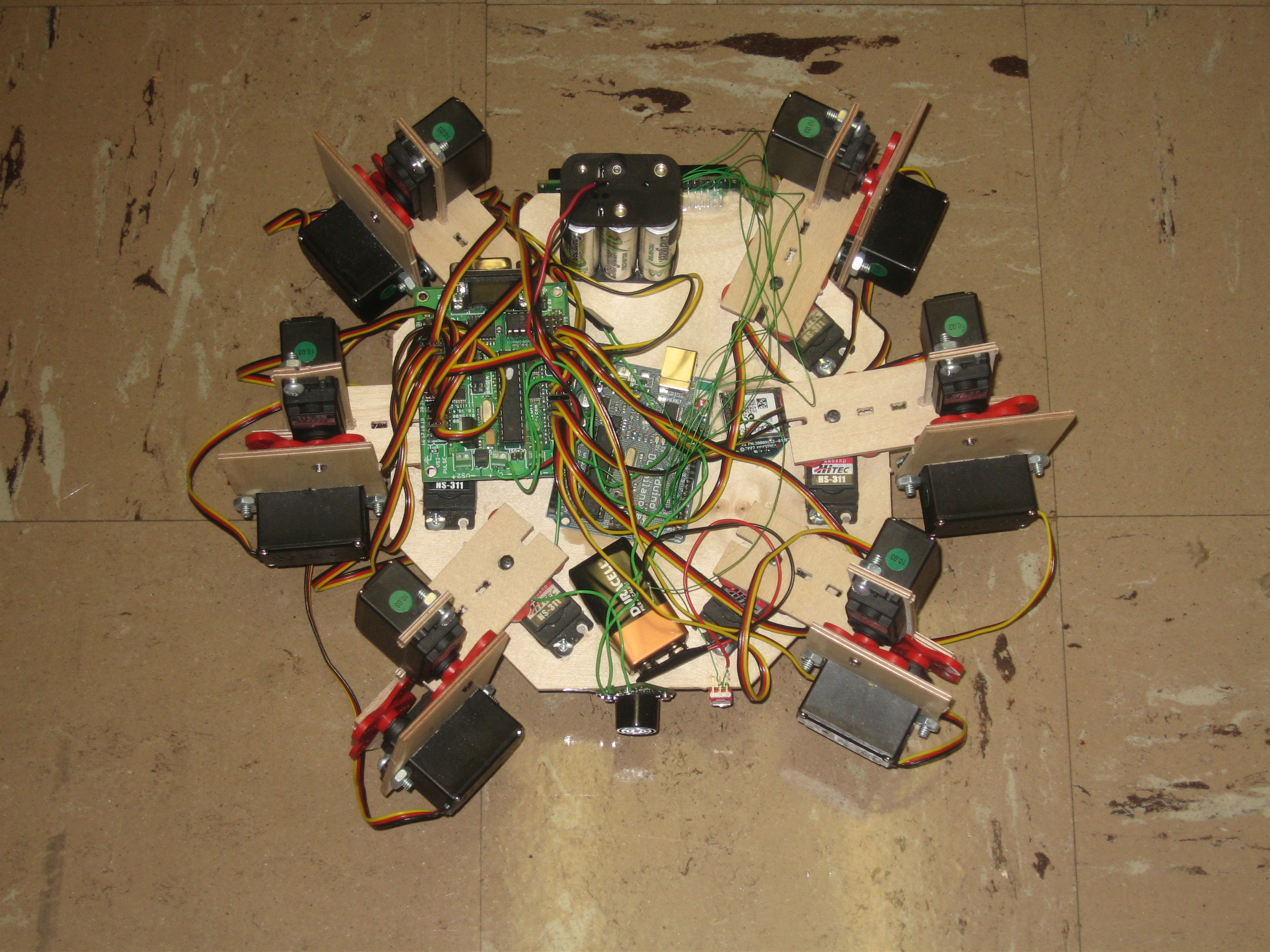
Sid the Spider
|
Mahbub Shahalam |
Sid the Spider is a hexapod robot that will respond to different voice commands like "twist", "roam", "dance", and "move forward". He will be able to roam about freely avoiding obstacles. |
|
|
FireBug
|
Marc Milks |
FireBug's primary function is to locate a flame source while avoiding obstacles. Once found, FIREBUG will deliver it's liquid payload to the flame and accomplish either an extinguishing or pyrotechnic goal. |
Final Report
|
|
nPi
|
Hunter Longshore |
The nPi swarm project is an investigation into the design and performance of a multi-agent autonomous system. The project includes the design and construction of two or more small-scale autonomous robots with integrated networking capabilities, as well as a network management layer for handling the coordination of global behaviors. |
|
|
Rico the Recycler
|
Mary Richeson |
Rico will pick up recyclables and sort them according to weight. |
|
|
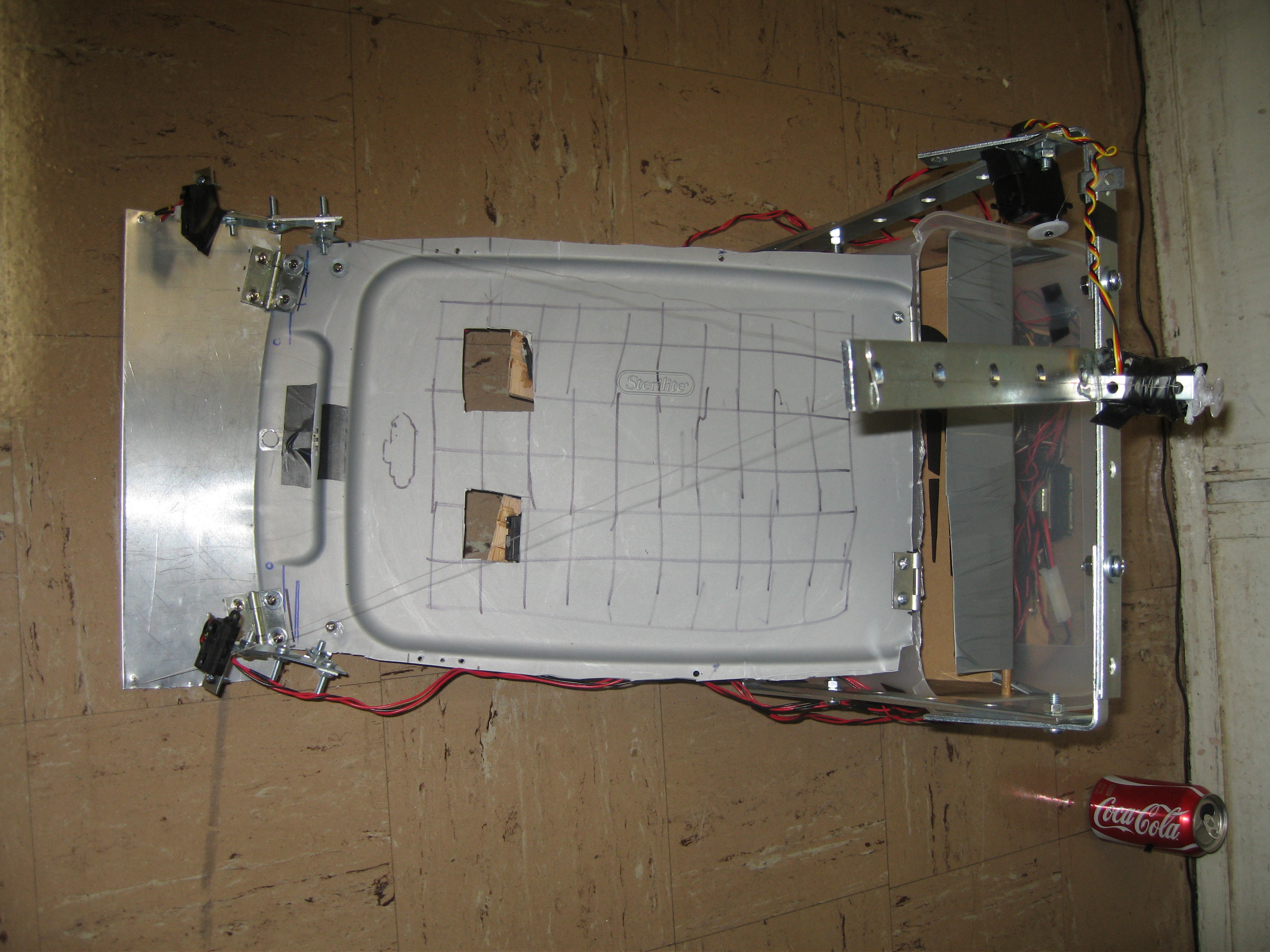
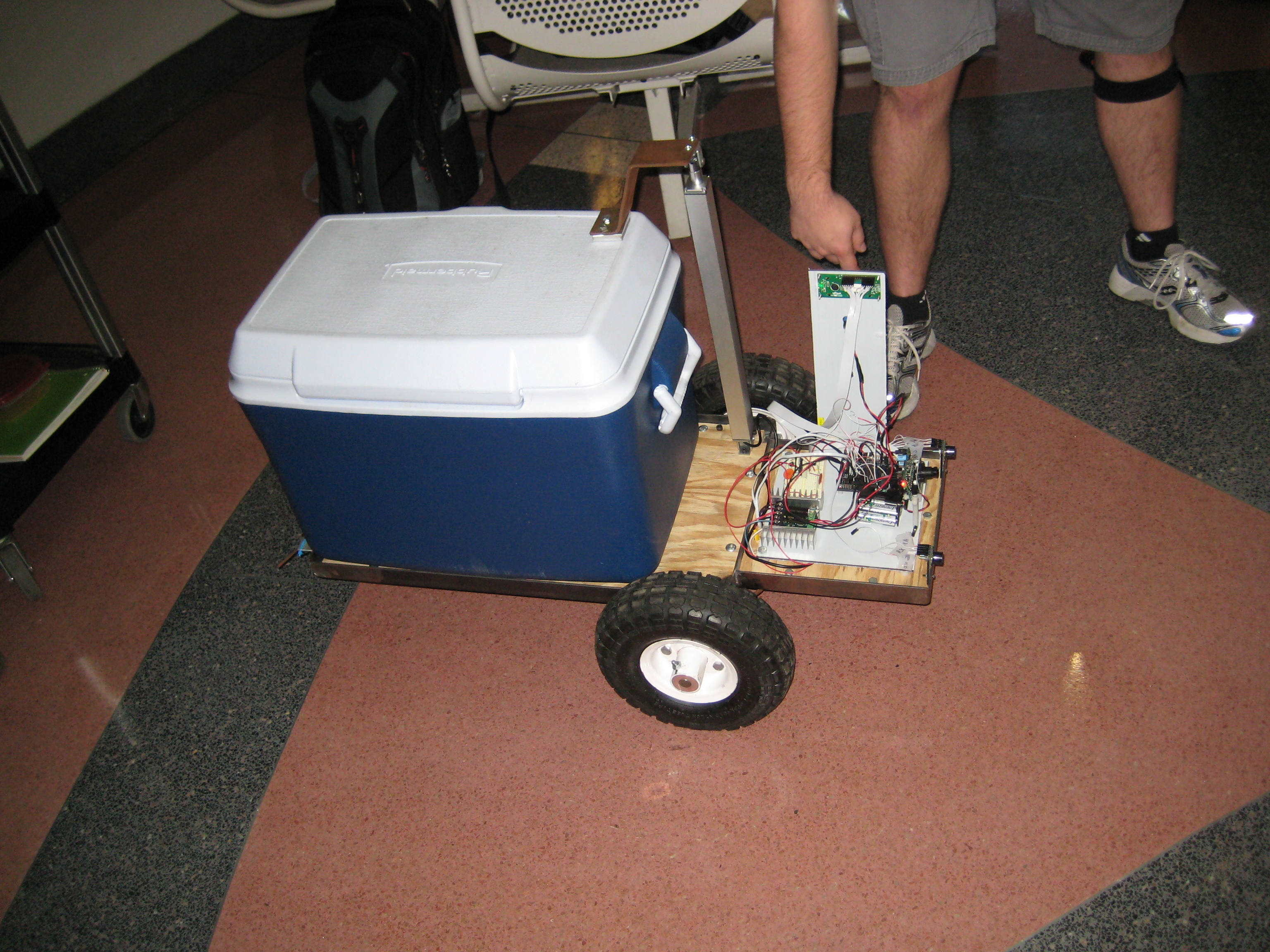
Tailgator's Best Friend
|
Mathew Johnson |
Tailgator's Best Friend will carry a cooler while follow his owner. TBF will have sensors to avoid obstacles and will open the cooler upon hearing a clap. |
|
|
The Librarian
|
Michael Boyco |
The Librarian's purpose is to enforce silence. The Librarian wanders around peacefully until a human speaks too loudly. The Librarian then tracks down the offender and fires a Silence-is-Golden foam missile at them in order to remind them to speak with an indoor voice. |
|
|
Horus
|
Miles Moody |
Horus is a quadcopter UAV (unmanned aerial vehicle); his purpose is aerial reconnaissance and sensing. He can carry a camera or an array of sensors and associate pictures or sensor data to locations by tagging them with GPS coordinates. He can also follow an object carrying a GPS beacon and hover overhead. |
Final Report
|
|
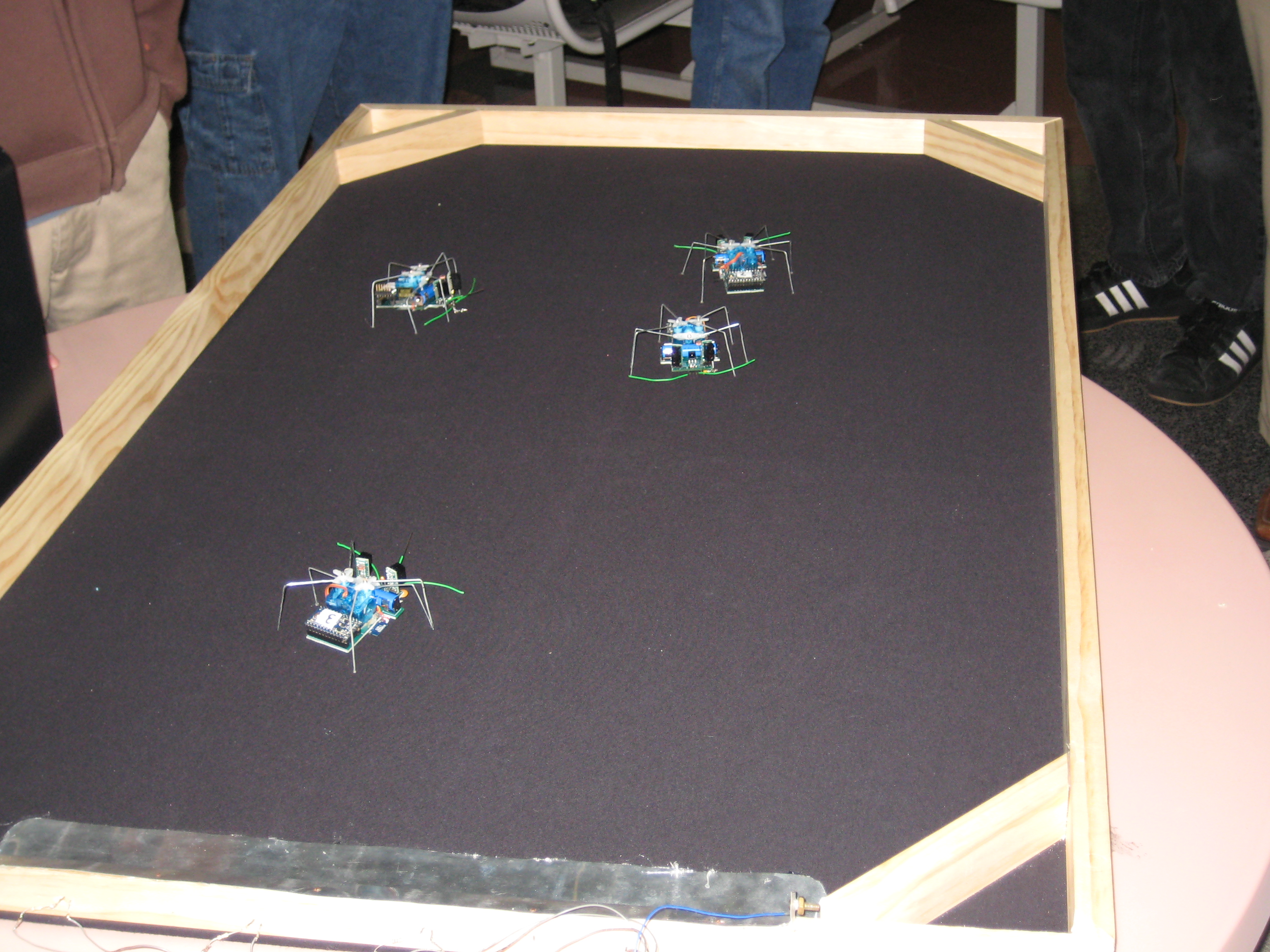
Hexy & the Swarm
|
William Patterson |
Hexy and his Swarm are a swarm of Hexapod robots. Each are capable of avoiding obstacles and of locating a home base where they can self charge when necessary. They will communicate with each other and a master to accomplish swarm tasks. |
Final Report
|